Ocean Robotics Team

Scott Glenn
Josh Kohut

Alex Lopez
Travis Miles

Grace Saba

Oscar Schofield

Mike Crowley
Need for Ocean Robotics
Since humans started doing research on the world’s oceans, we have used boats and ships as a means to unlock the ocean’s secrets, but these are expensive vessels to operate in a world that can become deadly when storms approach. Ocean robots, such as ocean gliders, can be deployed inexpensively, for months at a time, and are right at home acquiring data in the waves at the center of a hurricane or adjacent to the ice of the Antarctic. These remote vehicles are equipped to study scientific topics such as water quality, climate change, tropical storm intensification, ocean acidification and fisheries management. As technology has progressed, these robots have been equipped with an increasing array of instrumentation, allowing them to gather almost all information available through researchers at sea, making them the perfect asset to gather information ranging from pH, Oxygen and zooplankton in our coastal oceans, to temperature, salinity, wave heights and current speeds across our ocean basins.
Rutgers Contributions
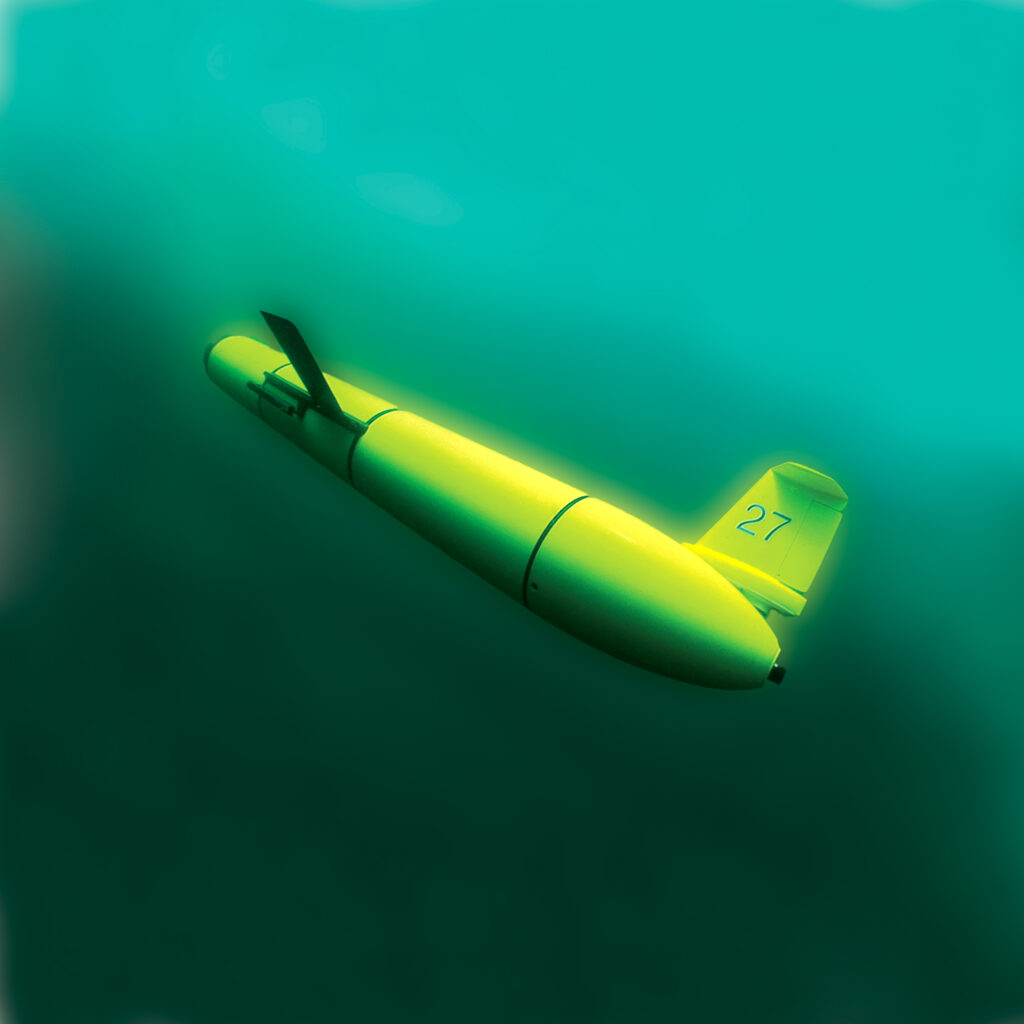
Rutgers deployed our first glider during the summer of 1998, and over two decades later, we have deployed gliders over 500 times across our planet in areas ranging from Svalbard to McMurdo Station, and from NJ to Sri Lanka. In 2009, Glider RU27 became the first robot to cross an ocean basin when if swam from NJ to Spain. Rutgers has remained at the forefront of the glider world, partnering on building the National Glider Data Assembly Center, hosting the 2019 EGO/UG2 international Underwater Glider meeting, and still remains a testbed for the newest state-of-the-art technology for new glider instrumentation, including integrating the first acoustic zooplankton sensor and pH sensor on a glider. Perhaps our best legacy is the many undergrad, graduate, and Navy students that have come through our doors to take our glider classes ranging from 1 week to semester long courses, and have gone on to become leaders in this industry throughout the US (and Europe?).
Resources
Mike Eichhorn, David Aragon, Yuri A.W. Shardt, Hugh Roarty. 2020. Modeling for the performance of navigation, control and data postprocessin of underwater gliders. Applied Ocean Research 101.
Carvalho, F., Gorbunov, M., Haskins, C., Oliver, M. J., Kohut, J., Aragon, D., Schofield, O. 2020. Mapping variable chlorophyll fluorescence using autonomous underwater gliders. Limnology and Oceanography Methods. DOI:10.1002/lom3.10380 PDF
Mike Eichhorn, David Aragon, Yuri A.W. Shardt, Hugh Roarty. August 2020. Modeling for the performance of navigation, control and data post-processing of underwater gliders. Applied Ocean Research Volume 101. DOI:10.1016/j.apor.2020.102191
Vargas, M. A., Miles, T., Glenn, S., Hogan, P., Wilson, W. D., Watlington, R., & LaCour, B. (2019, October). Impact of Glider Data Assimilation on the Global Ocean Forecasting System during the 2018 Hurricane Season. In OCEANS 2019 MTS/IEEE SEATTLE (pp. 1-5). IEEE. DOI:10.23919/OCEANS40490.2019.8962824
Saba, G.K., Wright-Fairbanks, E., Chen, B., Cai, W.-J., Barnard, A.H., Jones, C.P., Branham, C.W., Wang, K., Miles, T. 2019. The development and validation of a profiling glider Deep ISFET pH sensor for high resolution coastal ocean acidification monitoring. Frontiers in Marine Science 6: 664, DOI:10.3389/fmars.2019.00664
Pierre Testor, Brad de Young, Daniel L. Rudnick, Scott Glenn, Daniel Hayes, Craig M. Lee, Charitha Pattiaratchi, Katherine Hill, Emma Heslop, Victor Turpin1, Pekka Alenius, Carlos Barrera, John A. Barth, Nicholas Beaird, Guislain Bécu, Anthony Bosse, François Bourrin, J. Alexander Brearley, Yi Chao, Sue Chen, Jacopo Chiggiato, Laurent Coppola, Richard Crout, James Cummings, Beth Curry, Ruth Curry, Richard Davis, Kruti Desai, Steve DiMarco, Catherine Edwards, Sophie Fielding, Ilker Fer, Eleanor Frajka-Williams, Hezi Gildor, Gustavo Goni, Dimitri Gutierrez, Peter Haugan, David Hebert, Joleen Heiderich, Stephanie Henson, Karen Heywood, Patrick Hogan, Loïc Houpert, Sik Huh, Mark E. Inall, Masso Ishii, Shin-ichi Ito, Sachihiko Itoh, Sen Jan, Jan Kaiser, Johannes Karstensen, Barbara Kirkpatrick, Jody Klymak, Josh Kohut, Gerd Krahmann, Marjolaine Krug, Sam McClatchie, Frédéric Marin, Elena Mauri, Avichal Mehra, Michael P. Meredith, Thomas Meunier, Travis Miles, Julio M. Morell, Laurent Mortier, Sarah Nicholson, Joanne O’Callaghan, Diarmuid O’Conchubhair, Peter Oke, Enric Pallàs-Sanz, Matthew Palmer, JongJin Park, Leonidas Perivoliotis, Pierre-Marie Poulain, Ruth Perry, Bastien Queste, Luc Rainville, Eric Rehm, Moninya Roughan, Nicholas Rome, Tetjana Ross, Simon Ruiz, Grace Saba, Amandine Schaeffer, Martha Schönau, Katrin Schroeder, Yugo Shimizu, Bernadette M. Sloyan, David Smeed, Derrick Snowden, Yumi Song, Sebastian Swart, Miguel Tenreiro, Andrew Thompson, Joaquin Tintore, Robert E. Todd, Cesar Toro, Hugh Venables, Taku Wagawa, Stephanie Waterman, Roy A. Watlington and Doug Wilson. October 2019. OceanGliders: A Component of the Integrated GOOS. Frontiers in Marine Science: 02, 1-32. DOI:10.3389/fmars.2019.00422
Clark, D.B., Branch, A., Chien, S., Mirza, F., Farrara, J.D., Chao, Y., Fratantoni, D., Aragon, D., Schofield, O., Flexas, M., Thompson, A. 2019. Station-Keeping Underwater Gliders Using a Predictive Ocean Circulation Model and Applications to SWOT Calibration and Validation, IEEE Oceanic Engineering Society 10.1109/JOE.2018.2886092.
Glider Communications
Videos

Gliders II

OCOVI Gliders 2019
Atlantic Crossing – A Robot’s Daring Mission
Challenger Mission Trailer: Indian Ocean Leg 1 Australia to Sri Lanka
Doug Webb on the Slocum Glider