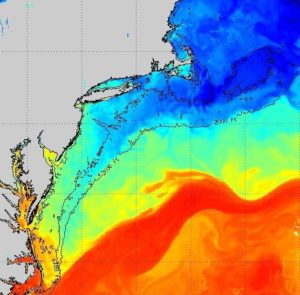
Real-time sea surface temperature data is available here.
 CODARs are compact HF radar systems that provide a current mapping, wave monitoring and ship tracking capability. COOL has continuously operated CODAR HF radars since 1999. COOL currently owns and operates 24 individual CODAR HF radars including a three nested multi-static network in the New York Bight and Palmer Deep Antarctica. Traditional HF radars operate in a monostatic backscatter mode, where the transmitter and receiver are collocated. Multi-static operation, enabled by GPS-based synchronization, allows a radar receiver to acquire signals from any radar transmitter within range. This transforms N individual mono-static radars into a network of N2 multi-static radars, increasing both the coverage area and the accuracy of the derived current fields. Nesting is achieved by operating at different frequencies, in our case 5 MHz, 13 MHz and 25 MHz. Higher frequencies result in higher resolution but over shorter ranges. The long range 5 MHz network is deployed from Cape May, NJ to Cape Cod, MA providing coverage of the continental shelf out beyond the shelf break and consists of 10 sites. We partner with others institutions to extend coverage down to Cape Hatteras. The intermediate 13 MHz network is along the entire New Jersey coast and consists of 7 sites. The high-resolution 25 MHz network is deployed at the entrance to and within New York Harbor and Delaware Bay – each of which has 3 sites. These sites are gps synchronized providing additional bistatic fields of component vectors.
CODARs are compact HF radar systems that provide a current mapping, wave monitoring and ship tracking capability. COOL has continuously operated CODAR HF radars since 1999. COOL currently owns and operates 24 individual CODAR HF radars including a three nested multi-static network in the New York Bight and Palmer Deep Antarctica. Traditional HF radars operate in a monostatic backscatter mode, where the transmitter and receiver are collocated. Multi-static operation, enabled by GPS-based synchronization, allows a radar receiver to acquire signals from any radar transmitter within range. This transforms N individual mono-static radars into a network of N2 multi-static radars, increasing both the coverage area and the accuracy of the derived current fields. Nesting is achieved by operating at different frequencies, in our case 5 MHz, 13 MHz and 25 MHz. Higher frequencies result in higher resolution but over shorter ranges. The long range 5 MHz network is deployed from Cape May, NJ to Cape Cod, MA providing coverage of the continental shelf out beyond the shelf break and consists of 10 sites. We partner with others institutions to extend coverage down to Cape Hatteras. The intermediate 13 MHz network is along the entire New Jersey coast and consists of 7 sites. The high-resolution 25 MHz network is deployed at the entrance to and within New York Harbor and Delaware Bay – each of which has 3 sites. These sites are gps synchronized providing additional bistatic fields of component vectors. Slocum Gliders are autonomous underwater vehicles that propel themselves through the water by changing their buoyancy and using their wings to glide in a sawtooth pattern through the water column along a subsurface transect. At user specified intervals, the glider surfaces, transmits its data to shore via the Iridium satellite system, and checks its email boxes for new directions or missions. The Slocum Gliders have been operated jointly by COOL scientists and Webb Research Corporation engineers in science experiments since 1999, transitioning to sustained deployments by the COOL Operations Center in 2003. Since then, the gliders have logged over 260,000 km of sampling in remote places such as Antarctica, Alaska, South Africa, Brazil, Sri Lanka, Norway, and in regions closer to home including the New York Bight, offshore Massachusetts, Virginia and Florida. 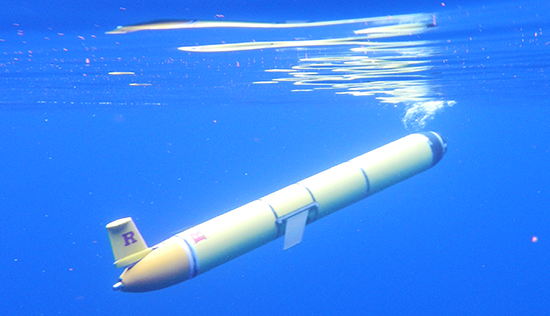 The fleet of 15 gliders now includes long duration gliders capable of several months of flight, stemming from the historic mission of RU27, the first glider to cross an ocean basin. Sensors on the gliders currently include a SeaBird CTD and a payload bay capable of carrying one of several optical sensors, including fluorometers and backscatter meters, a Beam Attenuation Meter (BAM), a hyperspectral spectrophotometer (Breve Buster), or a Fluorescence Induction and Relaxation (FIRe) sensor. Newly introduced sensors include a LISST for sediment transport measurement, pH sensor and a zooplankton acoustic sensor. A mission control center monitors glider progress on current missions and alerts operators of any problems.
The fleet of 15 gliders now includes long duration gliders capable of several months of flight, stemming from the historic mission of RU27, the first glider to cross an ocean basin. Sensors on the gliders currently include a SeaBird CTD and a payload bay capable of carrying one of several optical sensors, including fluorometers and backscatter meters, a Beam Attenuation Meter (BAM), a hyperspectral spectrophotometer (Breve Buster), or a Fluorescence Induction and Relaxation (FIRe) sensor. Newly introduced sensors include a LISST for sediment transport measurement, pH sensor and a zooplankton acoustic sensor. A mission control center monitors glider progress on current missions and alerts operators of any problems.
 RUCOOL has access to extensive computing facilities and data distribution systems, both in-house and as part of the broader Rutgers University research computing initiative. The group owns 9 multi-core Linux compute servers for the automated acquisition, processing and visualization of near real time environmental data sets focusing on a wide range of oceanographic and atmospheric research. For research projects involving long term modeling of the ocean and atmosphere, RUCOOL owns 3 compute nodes on the in-house DMCS computing cluster, Yojo. Additionally, the group owns 2 compute nodes on Amarel, the high-performance computing cluster housed at the Rutgers University Office of Advanced Research Computing, with the ability to coordinate additional resources with other DMCS faculty to bring the total node ownership to 4 for joint research projects. Amarel is used for daily, real-time model runs of the RU-WRF mesoscale atmospheric model, in addition to modeling for various research projects.
RUCOOL has access to extensive computing facilities and data distribution systems, both in-house and as part of the broader Rutgers University research computing initiative. The group owns 9 multi-core Linux compute servers for the automated acquisition, processing and visualization of near real time environmental data sets focusing on a wide range of oceanographic and atmospheric research. For research projects involving long term modeling of the ocean and atmosphere, RUCOOL owns 3 compute nodes on the in-house DMCS computing cluster, Yojo. Additionally, the group owns 2 compute nodes on Amarel, the high-performance computing cluster housed at the Rutgers University Office of Advanced Research Computing, with the ability to coordinate additional resources with other DMCS faculty to bring the total node ownership to 4 for joint research projects. Amarel is used for daily, real-time model runs of the RU-WRF mesoscale atmospheric model, in addition to modeling for various research projects.
In addition to processing power, the lab, combined with DMCS resources, has multiple redundant and replicated web and database servers to serve data through a variety of custom interactive web applications and commonly used web data delivery services such as ERDDAP and THREDDS.
In-house systems are administered by a 3-person technical computing team and have extremely high up times (~99%). All of the data sets are stored on a local networked file-server (currently totaling 500 TB usable capacity which will soon be expanded to over 1.5PB usable) and backed up disk to disk with snapshots and disaster recovery. All in house network connectivity runs on a 10Gb/s network backbone and high-throughput (10 Gb/s) external connections to the University’s broader research computing network are also available.
 RUCOOL has recently begun utilizing Unoccupied Aircraft Systems (UAS) or drones as platforms for our research. The Center currently maintains a fleet of four vehicles for a multitude of projects. Two members of the Center hold their Remote Pilot license as certified by the Federal Aviation Administration (FAA). These platforms provide on-demand remote sensing capabilities for a number of sensors with low cost and reduced human risk to other aerial platforms.
RUCOOL has recently begun utilizing Unoccupied Aircraft Systems (UAS) or drones as platforms for our research. The Center currently maintains a fleet of four vehicles for a multitude of projects. Two members of the Center hold their Remote Pilot license as certified by the Federal Aviation Administration (FAA). These platforms provide on-demand remote sensing capabilities for a number of sensors with low cost and reduced human risk to other aerial platforms.