Overview
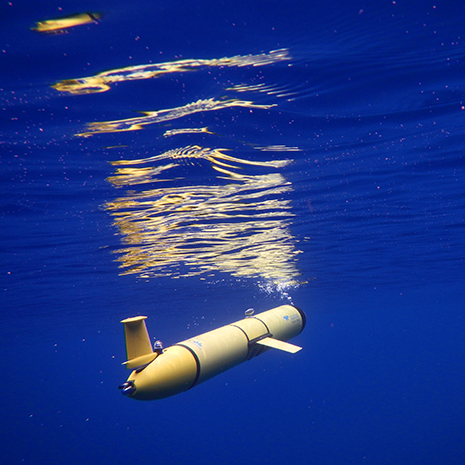
The Slocum Glider Autonomous Underwater Vehicle (AUV), built by Teledyne Webb Research Corporation (Falmouth, MA), is an integrated instrument platform designed to operate in the coastal oceans up to 1000m depth. Its primary propulsion is via buoyancy changes driven by a ballast engine in the front of the vehicle. This allows the winged robot to descend and ascend at a specified glide angle achieving forward velocity. Steering is achieved via a rudder in the tail of the vehicle.
The result is an AUV with low energy and high endurance making it highly adaptable at ocean observing. Dedicated sections of the vehicle can be equipped with over 100 different sensors for scientific measurements. Whilst deployed, the robot communicates and uploads data via an Iridium satellite link allowing contact to operators and scientists around the globe.
Whether the mission is a grad student project, hurricane forecasting model feedback, or entire ocean spanning sampling, the glider has become the instrument of choice for many ocean monitoring endeavors.