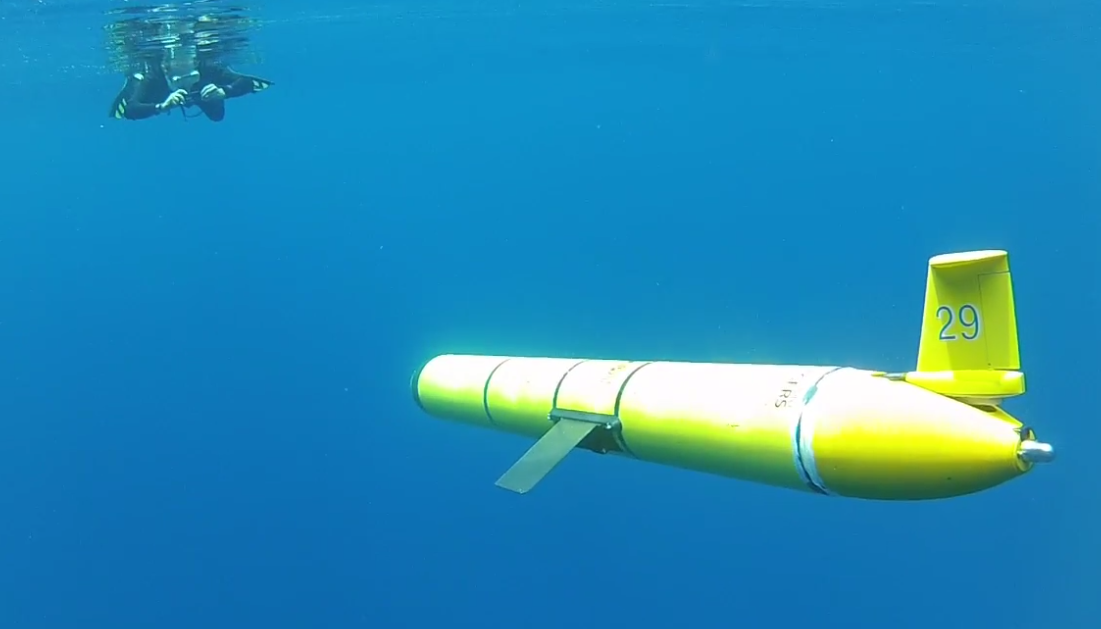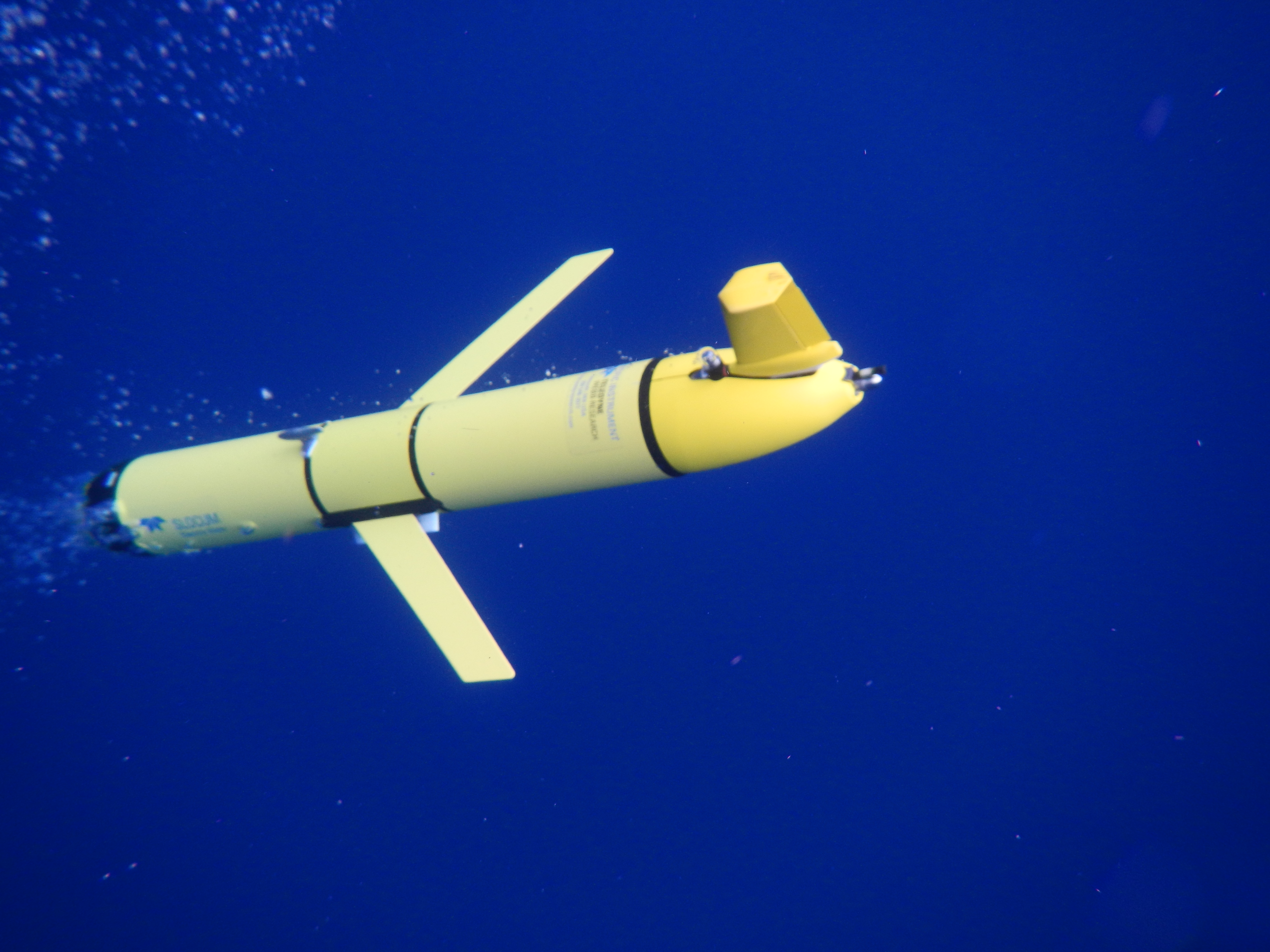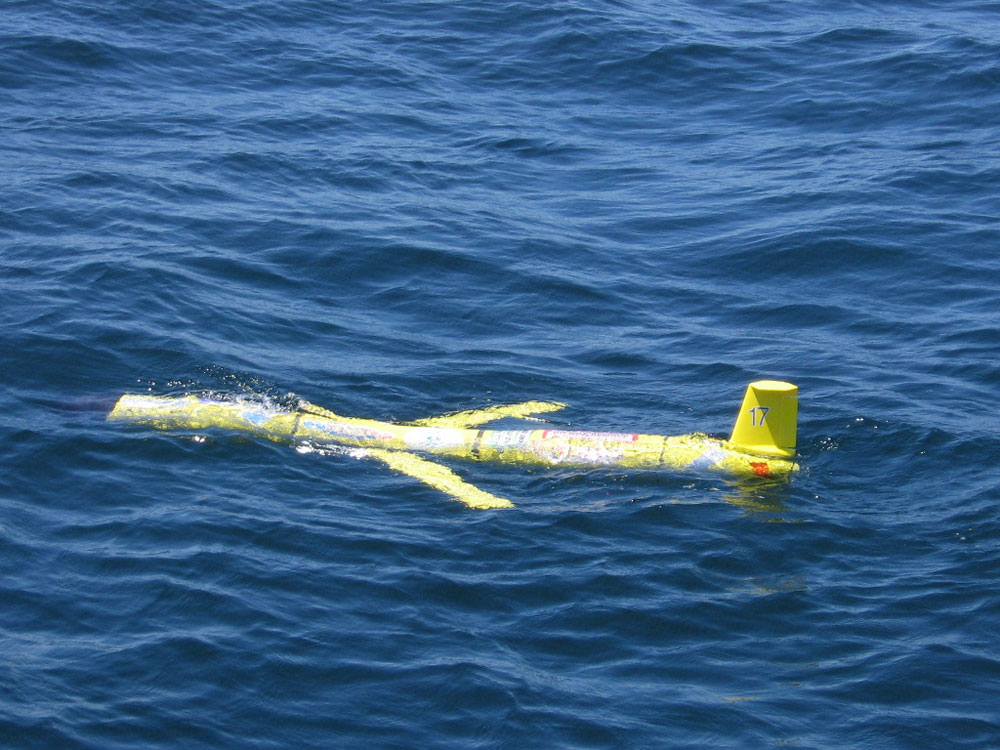
The Slocum Glider Autonomous Underwater Vehicle (AUV), built by Teledyne Webb Research Corporation (Falmouth, MA), is an integrated instrument platform designed to operate in the coastal oceans up to 1000m depth. Its primary propulsion is via buoyancy changes driven by a ballast engine in the front of the vehicle. This allows the winged robot to descend and ascend at a specified glide angle achieving forward velocity. Steering is achieved via a rudder in the tail of the vehicle. Utilizing this efficient, but slow, method of locomotion allows gliders to have endurance measured in weeks or months instead of hours or days. This allows gliders, on a single battery charge, to travel upwards of 1000 km all whilst sampling the ocean (or any body of water!) around it.
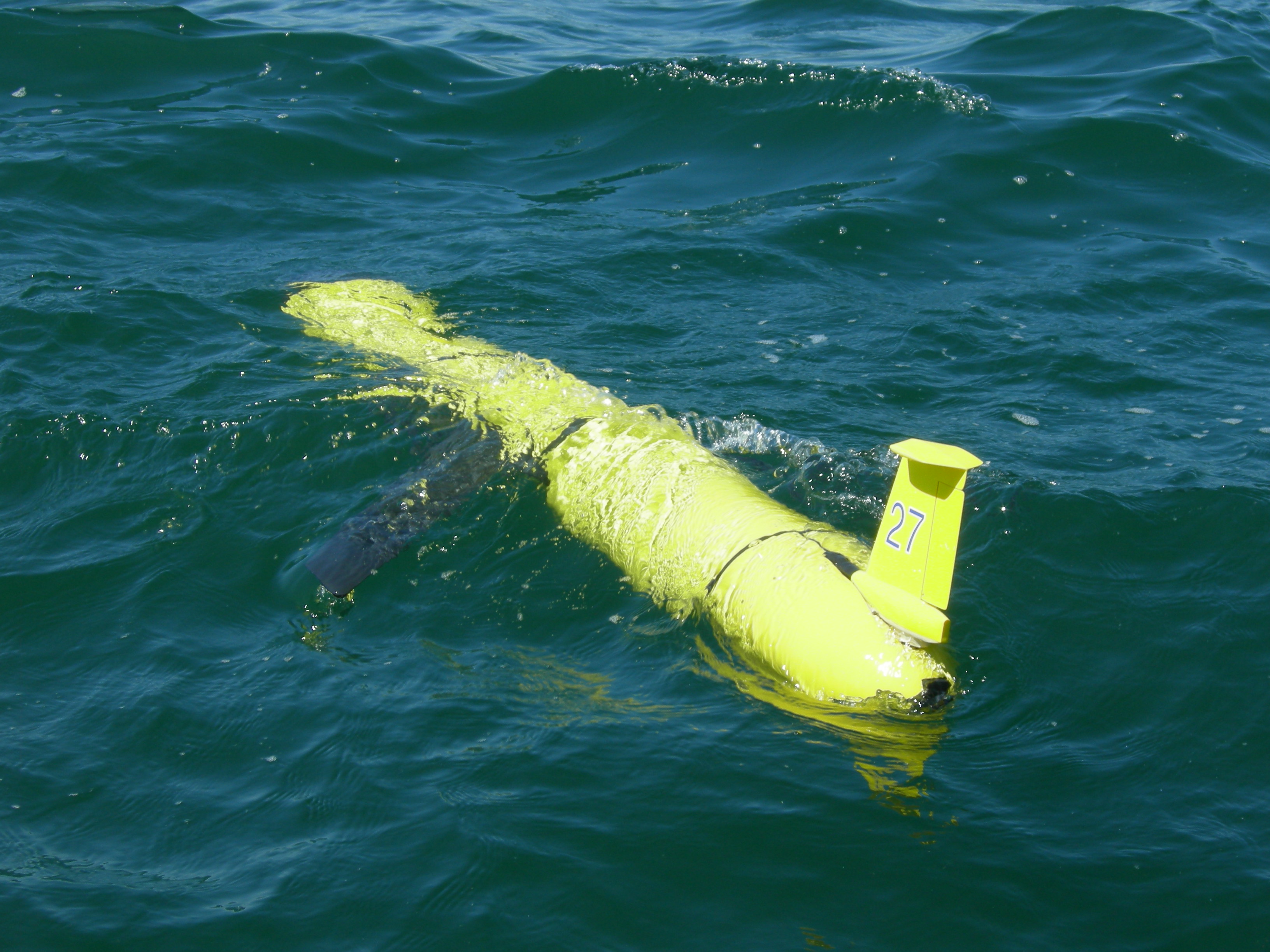
The result is an AUV with low energy and high endurance making it highly adaptable at ocean observing. Dedicated sections of the vehicle can be equipped with over 100 different sensors for scientific measurements. Whilst deployed, the robot communicates and uploads data via an Iridium satellite link allowing contact to operators and scientists around the globe.
Whether the mission is a grad student project, hurricane forecasting model feedback, or entire ocean spanning sampling, the glider has become the instrument of choice for many ocean monitoring endeavors. The live data is integral to operations at the COOL (Center for Ocean Observing Leadership) and other data utilizing entities. This data can include such water properties such as
- temperature, salinity, and density
- absorption & scattering of light: chlorophyll levels, particle size, etc.
- Currents measurements
- Biological measurements such as: oxygen, nitrate, pH, acoustic returns for fish or invertebrate as well as passive listening for marine mammals to spawning cod
These collected datasets are used not only in research but for real time ingestion into ocean models and subsequently into weather models. Gliders due to their high spatial sampling density and proximity to surface are welcome addition to satellite ground trothing or calibration/validation of remote sensors for satellite measurements such as color or sea surface height (SSH). Efforts are underway to improve hurricane forecasts utilizing glider data as gliders are deployed ahead of storms to monitor key areas before, during, and after storms arrival.
Conceived in a 1989 paper by Henry Stommel and Doug Webb, an idea was proposed to have an underwater glider powered by heat gradients between the upper warm and colder deep ocean. This, thermal glider concept, let to the development of the Slocum Glider which was named after Joshua Slocum (the first person to solo sail circumnavigate the world). Doug Webb founded Webb Research in Falmouth, MA to develop this idea.
In 1999, off the coast of Tuckerton, NJ, tests were being conducted on this new ocean observing concept, underwater gliders. The first gliders achieved only buoyancy related sink and float cycles, called ‘yo’s’ like a yo-yo toy. As the years passed by satellite communications were added, science sensors, and many more robust improvements to the platform. Today hundreds of operable gliders survey the seas and have become an indispensable tool for obtaining surface and subsurface data from earth’s bodies of water.
In the words of Doug Webb, for all future explorers of the world: ‘Work Hard, Have Fun, Change the World’