Spring 2025 Blog Entry 6 – Sentinel and Slocum
Hello everyone! We’ve got a bit of a shorter entry today. We’ll be looking at some data from the Sentinel Gliders that are down in San Diego and comparing them to the standard Slocum Gliders! Let’s get started!
Before we get into the data, let’s get into who is looking through it. Our class, Topics in Marine Sciences, is currently organized into 3 major groups, with some offshoots and independent projects such as the Hazards Group and the Sentinel Bloggers.
The Pathfinding group focuses on planning the routes that the sentinel glider is going to take on its journey. The uncertainty maps that we showcased in previous entries fall within their domain. The Outreach Group is focusing on spreading the word of the Sentinel Mission all over, from local municipalities to the other side of the world. Right now, the Outreach Group is in the middle of its school outreach meetings, which are going quite well. Lastly, we have the Data group, whose primary focus is looking through and working with data. Students in the data group have been learning to use python to visualize data and construct comparative graphs, some of which we will be looking through today!
In order to not make any mistakes, our explanations for what each graph means have been graciously provided by the data group! Thanks data group!
- Graph of Horizontal velocities for the Slocum and Sentinel Gliders
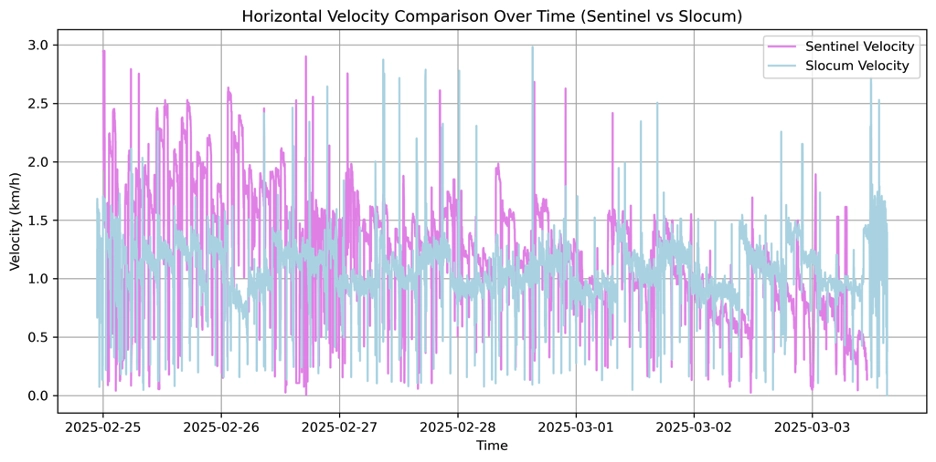 This plot describes the difference between the horizontal velocities of the Sentinel glider and the Slocum glider. As you can see, the Sentinel glider generally has a higher horizontal velocity than the Slocum glider, but there still are some points where the Slocum has a higher horizontal velocity. The difference in flight parameters for each glider likely explains this difference.
This plot describes the difference between the horizontal velocities of the Sentinel glider and the Slocum glider. As you can see, the Sentinel glider generally has a higher horizontal velocity than the Slocum glider, but there still are some points where the Slocum has a higher horizontal velocity. The difference in flight parameters for each glider likely explains this difference. - Slocum and Sentinel Glider Salinity Readings
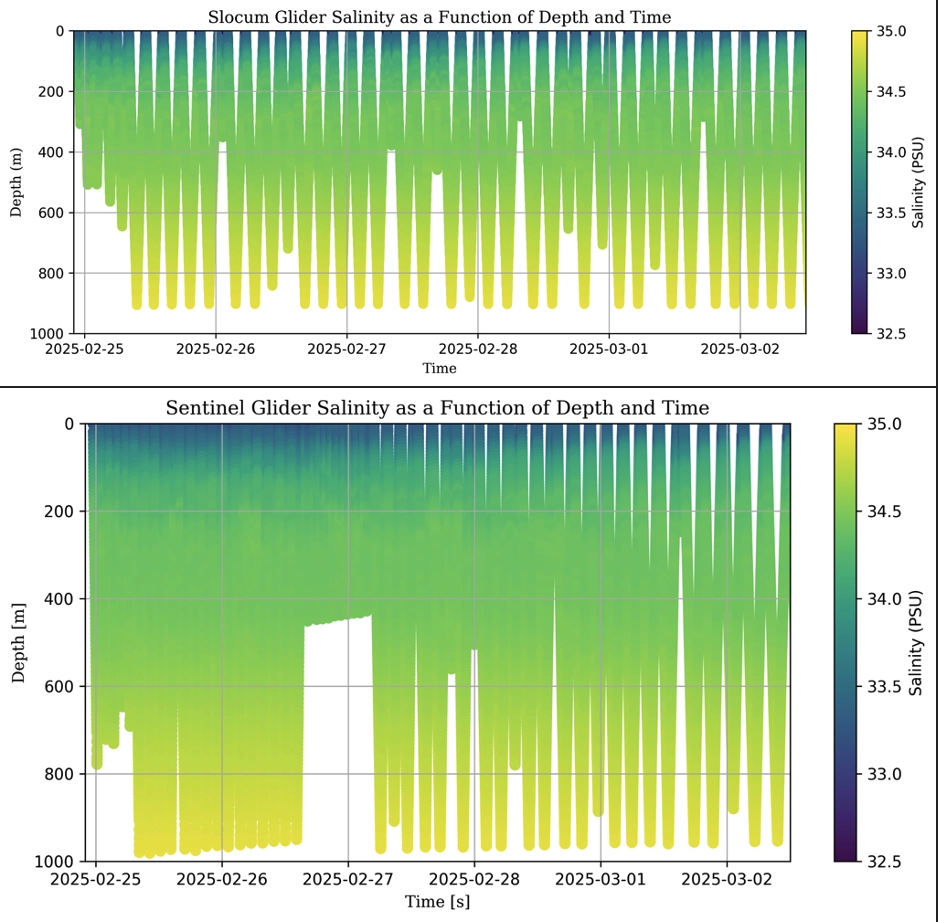 As you can see on the graphs, both the sentinel glider and the slocum glider were run on the same timeframe and in similar depths, but the visualization of salinity in parts of the sentinel graph looks more complete. This could be because the sentinel glider has greater average speeds and a larger battery, making more frequent dives possible.
As you can see on the graphs, both the sentinel glider and the slocum glider were run on the same timeframe and in similar depths, but the visualization of salinity in parts of the sentinel graph looks more complete. This could be because the sentinel glider has greater average speeds and a larger battery, making more frequent dives possible. - Graph of Vertical Velocity for Sentinel and Slocum
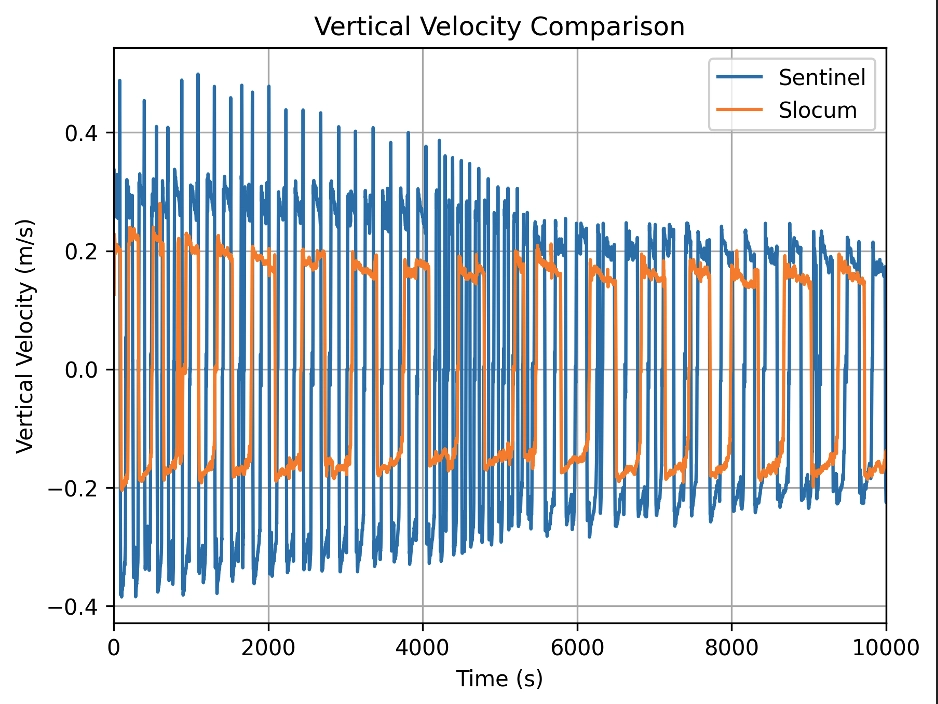 This graph shows a comparison of vertical velocities between the Sentinel and Slocum gliders over time. Looking at the graph, we can see that the Sentinel glider operates at a significantly higher velocity than the Slocum glider. Sentinel exhibits more frequent and more significant fluctuations in velocity, indicating that it ascends and descends much faster. In contrast, Slocum maintains a more stable and slower vertical movement. Over time, both gliders’ velocity variations stabilize somewhat, but Sentinel consistently shows greater speed. The difference in speed is due to the difference in the size of the buoyancy pumps.At the start of the graph, the Sentinel glider has a 99.98% difference in velocity compared to the Slocum glider. This is consistent with our data that shows it has roughly double the speed of the Slocum glider in the beginning. The end of the graph starts to even out and has a 29.65% difference in velocity between the gliders.
This graph shows a comparison of vertical velocities between the Sentinel and Slocum gliders over time. Looking at the graph, we can see that the Sentinel glider operates at a significantly higher velocity than the Slocum glider. Sentinel exhibits more frequent and more significant fluctuations in velocity, indicating that it ascends and descends much faster. In contrast, Slocum maintains a more stable and slower vertical movement. Over time, both gliders’ velocity variations stabilize somewhat, but Sentinel consistently shows greater speed. The difference in speed is due to the difference in the size of the buoyancy pumps.At the start of the graph, the Sentinel glider has a 99.98% difference in velocity compared to the Slocum glider. This is consistent with our data that shows it has roughly double the speed of the Slocum glider in the beginning. The end of the graph starts to even out and has a 29.65% difference in velocity between the gliders. - Graph of Vertical Acceleration for Sentinel and Slocum
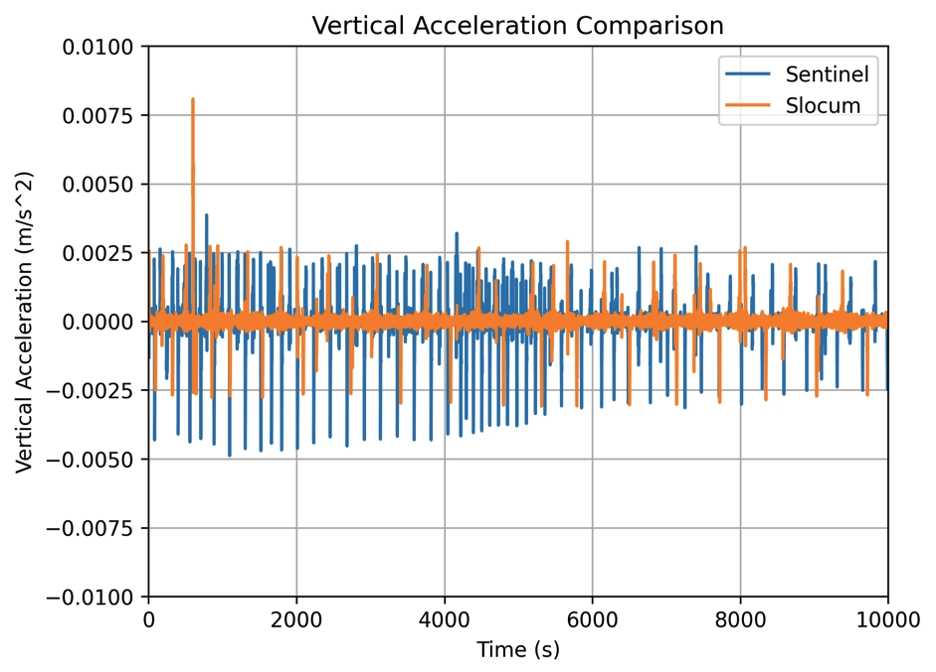 This graph shows a comparison of vertical acceleration between the Sentinel and Slocum gliders over time. Looking at the graph, Sentinel’s acceleration varies much more than Slocum’s, with bigger fluctuations up and down. This suggests that Sentinel is moving almost twice as fast in vertical motion, meaning it experiences greater changes in speed compared to Slocum.Meanwhile, Slocum’s acceleration stays closer to zero, indicating a steadier motion, except for one large spike early on. This sudden jump in acceleration means Slocum experienced a brief but strong movement, possibly due to an external force or an abrupt motion change. Like explained earlier when comparing vertical velocities, the difference in speed is due to the difference in the size of the buoyancy pumps.
This graph shows a comparison of vertical acceleration between the Sentinel and Slocum gliders over time. Looking at the graph, Sentinel’s acceleration varies much more than Slocum’s, with bigger fluctuations up and down. This suggests that Sentinel is moving almost twice as fast in vertical motion, meaning it experiences greater changes in speed compared to Slocum.Meanwhile, Slocum’s acceleration stays closer to zero, indicating a steadier motion, except for one large spike early on. This sudden jump in acceleration means Slocum experienced a brief but strong movement, possibly due to an external force or an abrupt motion change. Like explained earlier when comparing vertical velocities, the difference in speed is due to the difference in the size of the buoyancy pumps.
Alright everyone! That’s just about everything we have to share with you for now! Be shore to check back soon for more updates! Sea you later!
Spring 2025 Blog Entry 5 – Special Interview Pt. 2
Hellow everyone! Today we’ll be continuing our coverage of the interview we did with frequent collaborator Sal Fricano! Let’s get right to it!
Question 5: Can you tell us anything about how you got to where you are? I mean, you’ve been following the sentinel mission since it’s started right?
SAL: Historically the topics in marine science class before the sentinel mission had been introduced was a research class, which taught me a lot in my first few years of how to get involved with research, how to find a question of interest and get some information on it and data out in the world and start to answer some questions about it. That was a really unique perspective to gain as an undergrad for how this research of scientific methods can be applied to answer questions. So I remember one year, my third year as an undergrad, (5th time taking topics) and I go into class and Scott, Oscar, and Josh had all looked at us with a smile on their face ready to drop this bombshell on us to let us know that topics wasn’t just a research course anymore, It was going to be focused on answering scientific questions specifically for the first circumnavigation of a glider. That kind of spun that entire class around and prepared us for what we would now be doing. That course had taken that turn and since I had a lot of history in the course, I got to be very involved in leading the groups in guiding what those questions might be.
SAL: Scott, Oscar, and Josh gave us a lot of perspective on what they had learned historically from that Scarlet Knight voyage from New Jersey to Spain, which was a huge undertaking. There were reports of historical moments after that, where the series of Challenger missions or other Slocum gliders doing these transoceanic crossing of the Indian ocean and other huge ocean basins that we had flown through, and there were a lot of lessons learned in those times. They had shared that wisdom and knowledge with us, giving us the range to start answering the same questions that they still had about how we would facilitate it.
SAL: There was the mapping section where I was largely involved with, how we get from point a to point b and hope that we get there successfully in a time efficient and energy efficient manner. Another huge component of this would be outreach. We’re doing this huge historic scientific mission but we don’t want to do this alone, there’s no way we can do this alone. We are a class of dedicated students with wonderful professors at our disposal, but you can’t do something historic and global without friends around the world and supporters that can give you some insight, some wisdom, and some courage to actually do that mission. So the outreach group was responsible for local and global outreach, like getting local schools involved, getting kids involved to help support the mission, getting the word out there to all of these different communities across the world: that this robot was going to go around the world and help support our understanding of the oceans, and part of that message is helping people realize how important the ocean is to our lives.
SAL: No matter where you live, whether it’s on a coastline, or in the Midwest, in the US you’re affected by the oceans. You can be far or close but the weather is driven by the ocean, we know that this is a relationship and the weather affects everybody, so by helping spread that education and awareness and getting them excited that we’re making so many exciting technological advancements and how we can facilitate this research in our understanding of our ocean, its atmosphere, and its interactions is a huge component of supporting the mission. So how this ropes back into sentinel, we’re going to be flying across the world, but we’re going to be making pitstops along the way and so it’s important that we have friends in all of these different locations where it will stop so we can reach out and say “hey we’re going to fly this glider at your home country and we’re going to need help, can we use your lab space to change batteries along the way, can you get some people in your community involved so we can facilitate this global mission of scientific robustness”.
SAL: We want to send these vehicles out around the world, being out here for long periods of time getting real time data, helping support a global understanding of the oceans, this extends beyond the bounds of any one country or community, this is a global effort and we want all of our friends involved. So that is how I’ve grown with the class, and then of course as I mentioned my path, it was going from the academic side from being in topics helping facilitate some of this research and understanding, to now graduating, but I loved these gliders and didn’t want to leave the glider community, so I had the great opportunity to come to Teledyne and help develop and push the research and development of the sentinel vehicle along so that we can get this deployment underway.
Question 6: What were some of the challenges you faced on your way to where you are now?
SAL: Oh there’s certainly been challenges, I think everyone faces a lot of unique challenges, academic hardships, you may get an F on a test you studied very hard for, and certainly I am no exception to that. Ive failed my fair share of tests, Ive done a lot of work to achieve something that I didn’t meet my personal standards for, but one of the things that college taught me a lot is never be discouraged by one even. I think I kind of grew especially in my research, there’s a lot of bumps and ebbs and flows in how we achieve success and that’s been parallel in my work here, so as you know you set a goal for yourself and there’s never a linear path to get there. There will be ups and downs as you go there, but there’s some incredible lessons you can learn when you get knocked down and you say “ok how did I get here, what went wrong, and what’s something I can do better” and then use those lessons to get to a new high, to get progress towards your end goal, and you follow this curve and learn a lot along the way. It’s not about getting from point a to point b it’s about gaining wisdom and experience from the ups and downs along that path.
SAL: I think that has all tied into Teledyne, how we’ve been working on the sentinel vehicle. It’s been a huge research and development progress for us here and building the vehicle is no easy feat. We have hit a lot of bumps in the road trying to put the vehicle together into a flyable state, and we’ve learned so much along the way that’s opened our eyes to some of the challenges we didn’t know we’d face, and some unique engineering solutions we had to work around, so it’s been exciting being on this side of the aisle and seeing that. The concept never changes whether it applies to an exam, or to your work. You have a goal and you and your team are going to work to get from the start to the end, but you’re going to go through these ups and downs and as long as you’re open to gain wisdom and experience from what knocks you down, you’re guaranteed to go up and up and up until you reach your final goal, so broadly that’s been my experiences. Always been some hardships across every part of that aspect from school, to work but as long as you’re open to learning along the way, you will never fail.
Question 7: How are you feeling about the sentinel mission and its future?
SAL: I am feeling really, really positive. So, as the class knows we have just achieved the first 1000m dive with a sentinel vehicle in San Diego, which for our team was a huge accomplishment. Everyone from production to engineering who’s helped us solve all of the issues we’ve had with the vehicle, Software which has helped us program through bugs, glitches, and the code, and our team who’s been flying it aggressively week after week and finding all these failures, bringing it back to the lab to try and evaluate. It’s been a hard road to get here, but now having the vehicle out in the wild diving to 1000m really emphasizes that this is a flying functional vehicle that we’re at, and there’s certainly small things we want to iron out before we send it to be circumnavigating, but this news is a great sign to show that we’re doing the right things. We learned a lot of good lessons and implemented some good fixes for them. The vehicle is performing really well out in the wild, but the vehicle has been very well in it’s entire deployment. We will probably have it out for a little longer and probably recover it, bring it back home here to do a little bit more testing with it before we get it prepped for later this year and hopefully, deploy it on its first maiden voyage for its circumnavigation.
Question 8: So, One Last question to round things out. Is there anything that you want to tell our readers?
SAL: I would say to definitely keep an eye out for what the future holds. This is going to be a historic moment for all of the ocean nerds that are out there, but I think this is going to be a positive moment in history for all communities around the world. This is going to be a strong sign that the oceanographic research community is going to expand their capacity on how they pull data, and what their people are doing, and broadly that supports how the average person across the world will get information about their world and environment. When you check the weather app you want to know if it is going to rain this week, “I have plans this weekend, it’s going to be rainy this week I need to cancel my plans”, only to find out that the day you canceled your plans for it didn’t rain and your plans were canceled for nothing. This is a shared experience everyone has. When you trace back how we get that information it all comes down to things like this, where we have instruments out in the world. Researchers and scientists are collecting data to get information for global models for the ocean and weather forecast so that people around the world can make use of that. Technology like this (sentinel glider and circumnavigation) is a point in history where we see a change in how much data we can get back. Having a vehicle in the ocean for years at a time constantly collecting data is a huge increase in all these research capacities to keep fueling more data to make predictions and models more accurate, so the average everyday person will benefit from this, and it will be exciting to follow along and see how monumental this will be for the future and everyone’s average use of the forecast weather and predicted storm forecast.
Alright everyone, that’s the end of the interview! Us here at the Sentinel Blog had a great time interviewing Sal, and we thank him for his excellent answers to our questions! That’s everything we have for this week, but be shore to check back soon for more! Sea you later!
Spring 2025 Blog Entry 3 – Reminders + Gliders
Hello Everyone! Welcome back to the Sentinel Blog! Today, we’ve got some information about gliders and some updates/reminders about previously covered topics. Let’s get started!
First up, we’ve got a reminder about a series of events that we’ll be doing!
Over the course of the month of April, we will be having a series of 4 virtual meetings where we will answer questions that educators and some of their students have about the sentinel mission and the oceans. One meeting on April 3rd, One meeting on April 9th, One meeting on April 22nd, which is Earth Day, and one meeting on April 28th. All of us here at Rutgers are getting our knowledge up, so be sure to pack in some heavy hitting questions!
With that topic covered, let’s learn a bit about how gliders work. The Slocum Glider is an autonomous underwater vehicle (AUV) used for long-term ocean monitoring. This robotic glider navigates the water by adjusting its buoyancy, following a distinct sawtooth-like movement pattern to collect essential oceanographic data.

The front section houses the buoyancy control system, allowing it to ascend and descend, while the science bay carries sensors that measure various environmental parameters such as temperature, salinity, and even marine life activity through specialized instruments. The back bay contains the onboard electronics, thrusters, and emergency systems, ensuring the glider operates smoothly and can resurface if necessary.

These gliders are critical tools for modern ocean research, and much of their data is publicly accessible through platforms such as Teledyne, Rutgers University, and NOAA, allowing researchers, students, and citizen scientists to engage with real-time ocean monitoring.
Next up, Also about gliders, we have an update regarding the testing for the Sentinel Gliders. We have a deployment!
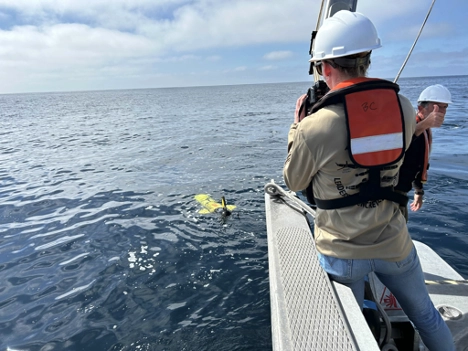
As you might recall, we mentioned some entries ago that there would be some glider testing done in San Diego, as there is easily accessible deep water there. Our people over at Teledyne have been hard at work to make sure that it was possible, and thanks to them we have a glider in the water! These deep water tests are essential to make sure that the sentinel glider is good to go down to those depths, and if it isn’t, then it’s important to know now so that changes can be made.
Alright everyone, that’s just about all the information we have to share with you in this entry. Be sure to check back soon for the next one! Sea you later!
Spring 2025 Blog Entry 2 – Uncertainty Map + Building Tour
Hello there everyone! Welcome back to the Sentinel Blog.Today, we’ve got some information about depth-averaged currents and our Uncertainty map we mentioned last time, and a short walkthrough of a building tour that we experienced! Let’s get started.
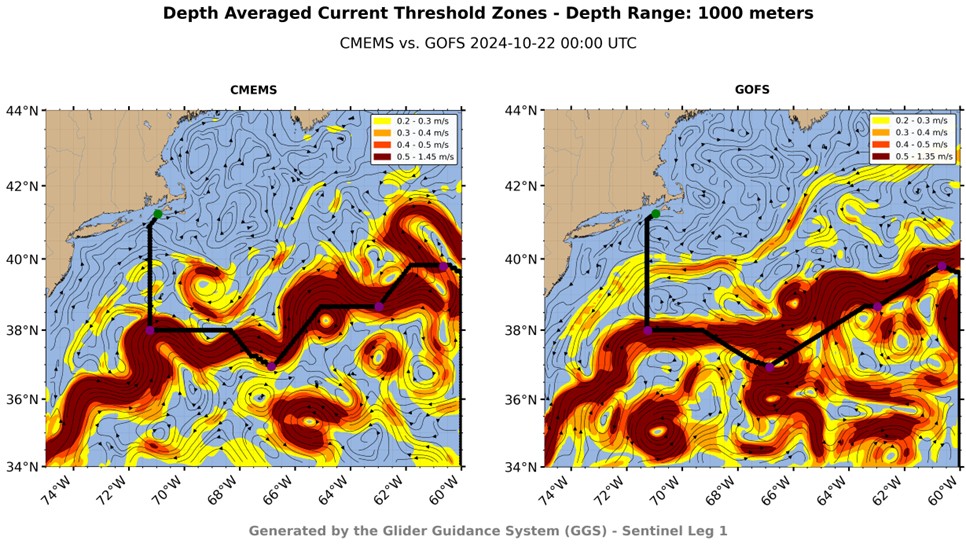
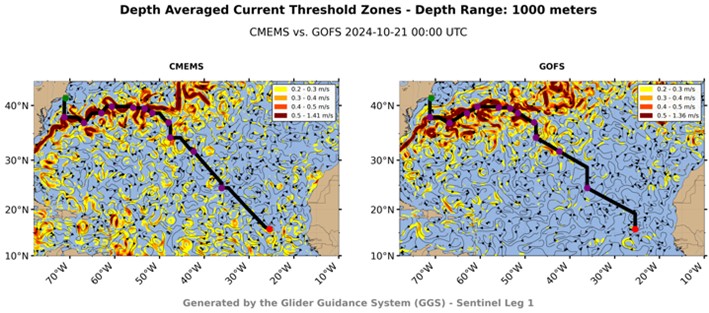
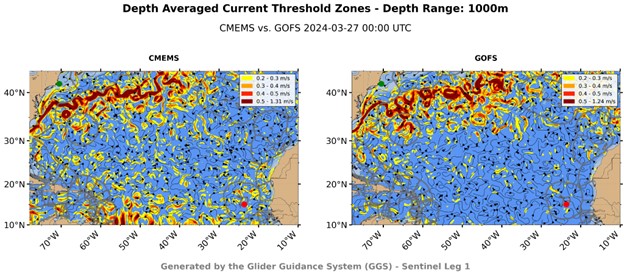
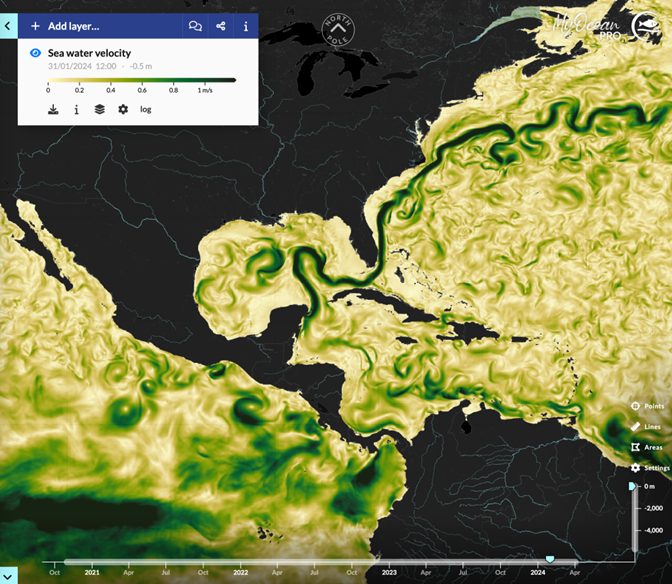
The way that gliders move through the water column is by floating up and then gliding down, with a vertical range of around 1000 meters. Gliders have a lot of moving parts in them, so they aren’t the fastest. To fix this issue, we try to have them travel along currents where possible. 1000 meters is a big range, and since ocean currents can vary greatly, we use models of the currents to find the average rates and directions of the currents. Some of the common models we use are the European Model, Copernicus Marine Environmental Service (CMEMS), the NOAA model, Real Time Ocean Forecast System (RTOFS), and the US Navy’s model, Global Ocean Forecast System (GOFS).
Now that we understand depth average currents, we can get back to our map from last week.
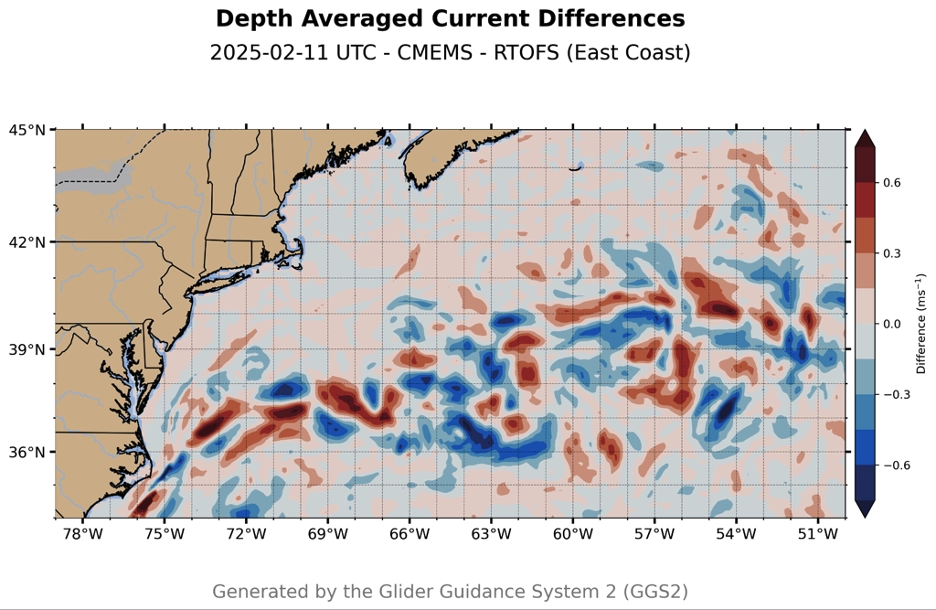
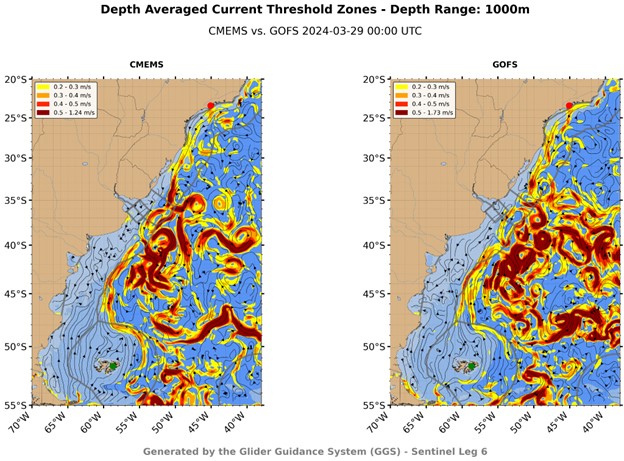
The uncertainty map shows the differences between depth averaged current magnitudes of the CMEMS and RTOFS models. The areas that are shaded in red are areas where CMEMS forecasts a current magnitude that is greater than RTOFS, and the blue shaded areas are where the current magnitude forecasted by RTOFS is greater than CMEMS. Darker colors indicate a higher difference. We can use these plots to understand the uncertainty between model forecasts and avoid areas of high uncertainty and take advantage of areas of low uncertainty.
Last week, our outreach group had the chance to explore the marine science building at Rutgers and check out some of the incredible work being done there. We got to visit two key areas: the COOL(Center of Ocean Observing Leadership) Room and the Water Lab, both of which play an important role in ocean research.

The COOL Room is where oceanographers test and maintain our Slocum gliders. As a quick refresher, these gliders are made by Teledyne-Webb Research and they collect data like temperature, salinity, ocean currents, clarity, chlorophyll concentrations and more, helping scientists understand changes in the ocean. Before they’re sent out into the water, they need to be carefully checked to make sure they’re working properly, and that’s exactly what happens in this room. It was really cool to see these high-tech machines up close and learn how they help with marine research.
Next, we stopped by the Water Lab, which is used to test different oceanographic instruments. The lab has a water source that can be adjusted to different temperatures, salinity levels, and pH levels so researchers can see how their equipment performs in real-world conditions. This kind of testing helps ensure that when the instruments are used in the ocean, they’ll provide accurate and reliable data.

Spring 2025 Blog Entry 1 – Introduction and Timeline
Hello everyone! Welcome back to the Sentinel Blog. We’ve had a refreshing winter break, and we’re ready to give you all some more news and updates about the Sentinel Mission! We’ll be keeping things a little bit light today with a short timeline of events and some information about an outreach event we’ll be doing!
Just in case we have any new readers, let’s do a quick re-introduction of the Sentinel Mission. To give a simple explanation, the Sentinel Mission aims to get an autonomous slocum glider to circumnavigate the earth. If(when) we succeed, we’ll be the 1st people in the world to do this. And perhaps even more exciting than that is all the good we can do with this mission! We’ll be able to collect more data about our oceans and be able to connect with and help educate communities all around the world about them!

Right now, we’re still testing the Sentinel Gliders. Last week, we did some trials in the cape cod bay, and this week we’ll be doing some deep water testing in San Diego. We are currently using 3 sentinel gliders for testing, with 2 of them in Cape Cod and 1 of them on the way to San Diego. It may seem like we’re doing a lot of tests, but it’s essential to find out what the problems are now and fix them instead of dealing with them in the open ocean.
In previous semesters, we set out with a clear goal: to inspire, educate, inform, and connect the world through the Sentinel Mission. Everyone attached to the sentinel mission has been working themself to the bone to make that mission a reality! We’ve had great successes in international and local outreach, and we’ve got a new program to further those successes and give back to some communities around the US. Take a look at this flyer to learn all about it!
The Rutgers University Center for Ocean Observing Leadership (RU COOL) is offering a unique opportunity for educators and students to explore ocean science through live virtual teleconferences with scientists. Participants will engage with ocean researchers, learn about autonomous ocean robots, and discover how cutting-edge technology helps us study climate change. The program includes interactive lessons, Q&A sessions with scientists, and hands-on STEM activities aligned with NGSS standards.
How to Apply
- Deadline: March 3, 2025
- Apply Online: Scan the QR code or visit this link
- Virtual Meeting with Scientists: March 18, 2025
- Teleconference Dates: April 3, 9, 22 (Earth Day), and 28, 2025
That’s just about everything we have to share with you for this entry, but we do have a sneak peek available for the next one!
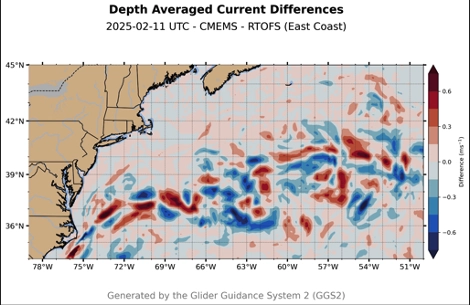
This map shows the differences between the depth averaged current magnitudes of two global models that we’re using. We’ll be going more in depth about this map and depth averaged currents next time. Be sure to check back here next week! Sea you later!
Blog Update 11-5-24:
We would like to update everyone regarding this new post on our blog and more information for the Redwing Sentinel Mission! In our course we have delegated our lecture hall into numerous sections to identify, present, and make targeted audiences aware of our missions underlying history and the future of marine science. Our group is reaching out to audiences such as regions relative to Rutgers, local schools in NJ, and an international outreach. Knowing this, below I will identify certain sections and what they have accomplished so far.
Lego Group:
“This year’s LEGO Challenge for 3rd-8th graders is “Submerged.” They were tasked with the challenge of building a Lego tool that can be used to observe life in the ocean. The students who are currently in robotics courses ranging from third to eight graders in the public schools were very engaged with the content that was being discussed. This group hosted a webinar to inform over 50 teams about our satellites, HF radar, and gliders and how we use them to collect marine data.” It was a great opportunity for aspiring students who are interested in STEM to see a real-life application to the major.
Below is a link provided to the submerged theme building instructions for these robotics’ students:
https://www.fllcasts.com/competitions/first-lego-league/2024-submerged/building-instructions
School Group:
The school group is currently coordinating with teachers and principals to get a day dedicated to teaching students about our mission and raising awareness for marine sciences. They will make it possible for students to take their creations and put them onto a flash drive that will be inside of the Slocum glider that traverses the world. A rough drafted letter has been constructed as a basis for students to share their ideas that will be seen on a global level from many different communities.


Pathfinders Group:
The map makers are currently reconstructing a more detailed pathway to represent where the redwing will be travelling during the sentinel mission. They are currently in the process of rendering the glider route, as well as navigating any potential hazards that may be encountered during the different legs of the route.
International Group:
The international group is working on expanding accessibility to the glider game. Not only does this include numerous languages such as U.S. Brail, Spanish, and Portuguese, but also adjustments to metric values for these communities (E.g., feet to meters). This group is also drafting letters to send to members around the globe to reach these audiences and raise awareness for the red wing mission. Some of the updates being made to the game is an expansion pack with new questions for the cards, an updated version of the map, and new playable pieces. Shown below is a visual of the game that is being reworked and a sneak peek at the process of developing new questions. As of today, an outreach email was just sent to promote awareness for the mission and the upcoming event
Rutgers Outreach:
For the reach out of Rutgers audiences, a presentation has been developed which outlines the previous data of past missions, challenges of the sentinel mission, technical information on the glider, and information regarding what each section of our course is doing in terms of outreach in preparation for our upcoming event. This presentation will be given to the chancellor to explain what our course is currently trying to achieve

To celebrate the growth and progress of the Slocum redwing glider for the upcoming sentinel mission we would like to announce an event that we are holding. On December 4th we will be hosting an event in the International Food Nutrition and Health (IFNH) Building. It will be an open environment to network with previous marine science alumni, current graduate and undergraduate students, and professors that have worked on and developed this technology. At the event there will be video presentations, tours of the marine science building, networking potential and food! Merch including tee-shirts, hats, and other accessories are currently in development for the upcoming event which will be released soon.

Blog Update 11/12/24
Regarding what our course has done over the past week, we have been further developing our personalized sections to successfully prepare for our upcoming sentinel mission event on December 4th, 2024. Emails have been sent towards teachers, schools, professors, and the chancellor. We are currently working on developing messages to send to our international members as well as previous marine science alumni in preparation for our event. This will allow us to have more people to support and celebrate the growth and progression of this mission while allowing current college students to build a network amongst their peers. The images below were from the last years seminar which revealed the Slocum sentinel glider its designs and functionality


A meeting has been made to discuss the potential time to initiate the launch of the redwing glider and they have concluded that 2025 a set date will be made in the Spring of 2025. To avoid any complications, allow time to fine tune the glider, and to have better oceanic conditions, the members working on the glider felt the need to extend the period of the launch. A date for the launch will be updated as soon as one is presented, and we hope to see your support throughout our process.
An update for our sections is as follows below:
School outreach: we are currently developing a teacher letter and student letters that include mad libs and drawings. The letter is being proposed to teachers for three different age groups to incorporate their ideas into the sentinel mission. In essence we will send our letters towards the schools the schools will send us back all the student’s ideas and we will import them onto a usb drive which will ride inside of the redwing glider on the mission. This allows these students to be a part of a project at this scale which can inspire them to thrive for knowledge being that they are the next generation that have the potential to be oceanographers
RU outreach: they are currently developing letters towards previous alumni to make them aware of the event in December as well as working on a letter to send to the Webb family. A video for Douglas Webb has been in development which will honor his legacy and be presented during the redwing event to commemorate his contributions towards the project
Mapping Group: further developing individual maps and adding them together to represent an overall pathway for the glider to travel.
International group: this group is currently adjusting the game and sending out emails to approve the adjustments.
Blog Update: 11/19
This week, our teams have been hard at work making final strides on their projects, preparing to showcase their efforts at the upcoming event.
Mapping Group:
- Finalizing their data to present both global and localized patterns, creating visuals that will offer a broad yet insightful perspective on the issues at hand. Their work bridges global trends with local impacts, ensuring an engaging presentation.
RU & School Outreach:
- Reaching out to alumni and institutions, they’ve been sending and receiving emails to strengthen connections and broaden engagement. Their efforts are ensuring strong attendance and fostering partnerships that support our mission.
Game Group:
- Focused on inclusivity and creativity, they’re developing an interactive poster board and enhancing their game. Updates include new language options and a Braille version, making the project accessible to a wider audience and ensuring a meaningful experience for all.
We’re excited to see everything come together and to share these projects with you. Don’t forget to mark your calendars for this special event—we can’t wait to connect with you and showcase our hard work!
Blog Update: 11/26
Thanksgiving Break! Enjoy your holiday weekend and take time to relax with your families. Our class is currently preparing for the long weekend off and there will be another blog update prior to the event. We hope to see you all soon and are excited for the upcoming event on the fourth!
Blog Update 12/3
We’re thrilled to share some exciting news! As of today, our team is putting the finishing touches on preparations for the highly anticipated event happening tomorrow at the INFH Building. Over the past few weeks, we’ve been fine-tuning our presentations, making small but impactful adjustments to ensure everything ready to present. We’ve also carefully gathered all the resources we’ll need to create an engaging and memorable experience for everyone attending.
This event is the culmination of our hard work and dedication throughout the fall semester, and we couldn’t be more ecstatic to finally share it with you! It’s not just about showcasing our efforts—it’s also a fantastic opportunity to connect with fellow oceanographers, exchange ideas, and celebrate the incredible work happening in our field.
We sincerely hope you’ll make the time to join us and be part of this special occasion. Your presence would mean so much to us as we unveil our projects and foster connections within our community.
5/9/2024

Rutgers University and Teledyne Webb Research unveiled The Sentinel Mission in a remarkable display of academic and technological collaboration. This unprecedented initiative marks the beginning of an ambitious journey as Teledyne’s Slocum Sentinel Glider, “Redwing,” (Research & Education Doug Webb Inter-National Glider) prepares for a historic round-the-world flight. Redwing is an acronym for “Research & Education Doug Webb Inter-National Glider”. The mission is further strengthened by the involvement of NOAA, the Marine Technology Society, and the UN Ocean Decade.
The event, which took place at Rutgers University on April 23, showcased the intricate planning and resilient partnership behind The Sentinel Mission. The Redwing glider, embodying the intersection of Research and Education, pays homage to Doug Webb, a pioneer of autonomous underwater technology. The glider stands not only as an innovative piece of machinery but also as a symbol of global research unity and exploration.
 Rutgers President Jonathan Holloway delivered remarks, along with several esteemed faculty members, each sharing their encouragement and support of this mission. Teledyne Marine staff members, Clayton Jones, Senior Director of Technology and Shea Quinn, Slocum Glider Product Line Manager, provided insight into the history of Slocum gliders and how this mission will affect the future of ocean science.
Rutgers President Jonathan Holloway delivered remarks, along with several esteemed faculty members, each sharing their encouragement and support of this mission. Teledyne Marine staff members, Clayton Jones, Senior Director of Technology and Shea Quinn, Slocum Glider Product Line Manager, provided insight into the history of Slocum gliders and how this mission will affect the future of ocean science.
A highlight of the event was the christening of the glider, “Redwing,” with seawater from Cape Cod, signifying its readiness for its summer 2024 launch. Attendees witnessed a blend of time-honored maritime tradition with cutting-edge innovation.
A cohort of Rutgers’ brightest undergraduate students presented the mission’s flight path. Their extensive planning encompassed considerations for ocean currents, water conditions, and other environmental variables. These presentations highlighted the exceptional educational experiences at Rutgers, exemplifying the university’s dedication to hands-on, impactful learning.
Insights from international partners integral to the mission’s global scope further enriched the event. With each presentation, the essence of collaborative spirit and international cooperation became clearer, setting the stage for a truly global expedition.
 The day’s activities culminated with a closer look at the Sentinel Glider, showcasing its capabilities compared to standard models. The academic community, including master’s students and faculty, engaged in fruitful discussions about sensor integrations and future research applications.
The day’s activities culminated with a closer look at the Sentinel Glider, showcasing its capabilities compared to standard models. The academic community, including master’s students and faculty, engaged in fruitful discussions about sensor integrations and future research applications.
The Sentinel Mission’s anticipated launch in the summer of 2024 will contribute to our understanding of the oceans and serve as an inspiring testament to the power of academic-industry partnerships and the indomitable human spirit of discovery.
About Teledyne Webb Research: Teledyne Marine is a group of leading-edge technology companies that are part of Teledyne Technologies Incorporated. Through acquisitions and collaboration, Teledyne Marine has evolved into an industry powerhouse, bringing Imaging, Instruments, Interconnect, Seismic, and Vehicle technology to provide solutions to our customers. For more information, please visit www.teledynemarine.com.
About Rutgers University: Rutgers University is a leading national research institution that has consistently pushed the boundaries of innovation and education. The Sentinel Mission represents the university’s commitment to exploring new frontiers. For more information on the mission’s background and Rutgers’ history with such initiatives, please visit the Challenger Glider Mission website at www.rutgers.edu.
Original article at Rutgers NJAES Newsroom
4/22/2024
Sentinel Mission Blog: Entry 4 – April 23rd
Welcome back to the Sentinel Mission Blog! You may remember that in last week’s post we talked about some of the hazards around our launch and what steps we would take to ensure that it would be successful. As we get closer to our launch date, it’s critical that we spread the word about our Mission. Thankfully, we have a day set aside especially for that: April 23rd.
So, what exactly will we be doing on April 23rd? To put it simply, we will be having a wide variety of people present during our class time. From 8:30 – 9:50, we will have guest speakers that range from Rutgers Administrators, Teledyne and NOAA Representatives, our correspondents in the countries that we’ll make our stops in, to our very own classmates and students.

Now that we have an idea of what April 23rd is going to look like, we should get more specific with what we will actually be happening. First of all, The President of Rutgers, Jonathan Holloway, and the Dean of the School of Environmental and Biological Sciences, Laura Lawson, will be giving a brief introductory speech and comments.
Once they finish, We’ll move on to our next guest speakers, Craig McClean and Trisha Bergmann from NOAA. This class, Topics in Marine Sciences, has had a relationship with NOAA since its inception. Afterall, they were the ones who officially challenged us to cross the Atlantic with a glider in 2009!
After they finish, we will have some representatives from Teledyne Marine, Clayton Jones and Shea Quinn, introduce the Sentinel Glider. Once they say a few Words, they’ll christen the glider with some seawater!

Once Shea finishes her speech, it’ll be time for the efforts of the students throughout the semester to be revealed in our class presentation! We’ll be discussing a variety of topics, such as, the Sentinel Mission, the Sentinel Glider, any trinkets that we’ll put inside the glider, the route we’ll be taking, the hazards we’ll be dealing with, outreach, and more.

After our class presentation finishes and we have a short Q&A Session, we’ll move on to our last section, Comments from some of our International partners.
From Spain, we have Ana Mancho, who leads the Geophysical Dynamics Group at the Instituto de Ciencias Matematicas, Enrique Alvarez, who is the head of the Physical Oceanography division at Puertos Del Estado, Antonio Ramos, who made the Glider position prediction system Pinzon, and Carlos Barrera, who is the Head of the Ocean-Vehicles Unit with the Oceanic Platform of the Canary Islands. From South Africa, we have Tammy Morris, who is the Senior Manager for Marine at the South African Weather Service. From Australia, we have Chari Pattiarachi, who is the Head of the Coastal Oceanography Group of the University of Western Australia. From New Zealand, we have Joe O’Callaghan, who founded Aotearoa New Zealand’s glider facility.
A big point of our April 23rd presentation is to spread the word about our journey across the world, so that we can hopefully secure some funds for our trip, and increase global knowledge about the ocean!
Alright everyone, that’s all the information we have to share for now. Be sure to check in soon for more! Sea you later!
4/09/2024
Sentinel Mission Blog: Entry 3 – First Week Hazards
Welcome back to the Sentinel Mission Blog! You may remember that in last week’s post we looked at some maps that outlined advantageous paths for our glider! This week, we’re going to be taking a look at some more maps, and this time, they’ll help us determine where exactly we should start off our journey. We’ll be launching off of the coast of Cape Cod in Massachusetts, however, Cape Cod is an area that has a lot of things that could interfere with or damage our glider, so we need to find a launch site that minimizes the risks. To assist us in this task, we will be using the Marcos Ocean viewer. Let’s dive in!
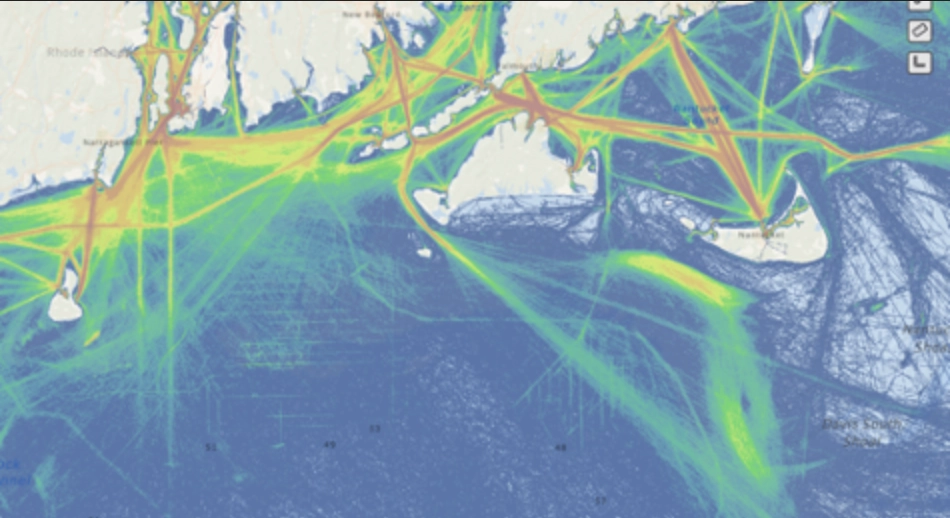
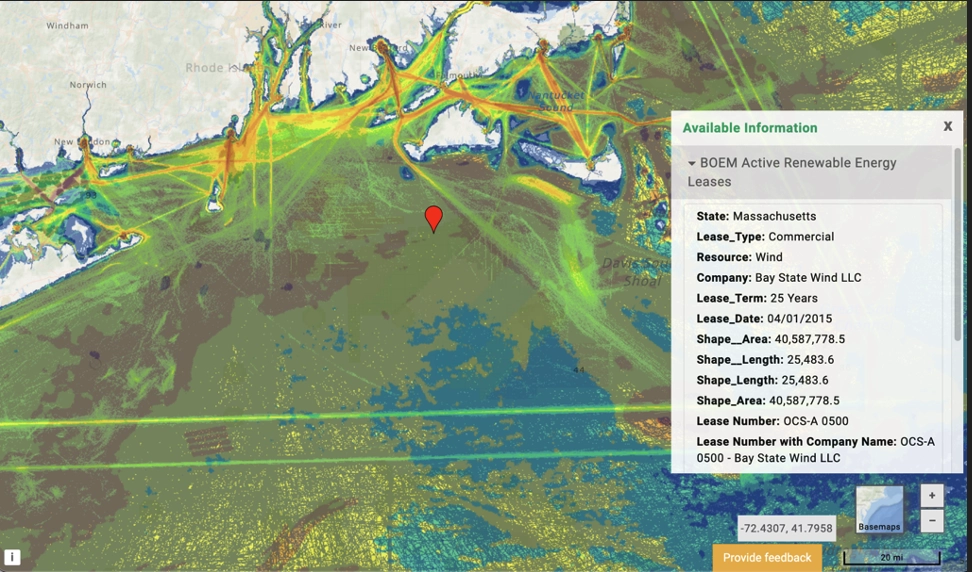
During the first week of its journey, the Sentinel Glider will face a major obstacle: avoiding shipping lanes. Off the coast of Massachusetts, where the glider will depart, there are many fishing, cargo, and other vessels traveling to and from shore. These ships move much faster than the Sentinel Glider, so if the Glider got caught in a shipping lane, its journey would end there. In order to avoid collisions with vessels, the Glider has to dive deep into the water and/or have a route planned around known shipping lanes. Once the Glider successfully makes its way off the continental shelf and into open ocean, shipping lanes are more dispersed, so the chance of colliding with a vessel is much less likely.
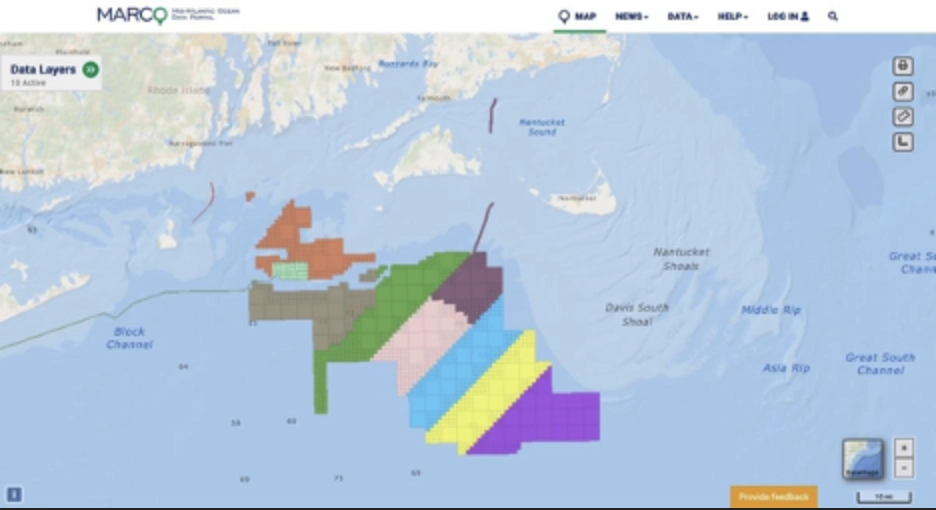
Another obstacle that our navigation team has to prepare for is the construction of offshore wind farms. Currently, off the coast of Rhode Island and Massachusetts, offshore wind turbines are being built. There are already some sites that are up and running as well. Both of these locations are something we are going to have to avoid. Although these sites contribute to sustainable energy goals, it is not a place we want our glider to be as it poses a high risk for our mission. Preparations made by our path planning team will help to curb this risk.
While shipping lanes are one of the many dangers that the Sentinel Mission will face, those ships tend to stay in designated “highways”, making them easier to avoid. Smaller ships, especially those used for commercial and recreational fishing, pose a greater level of risk due to the number of unknowns involved.
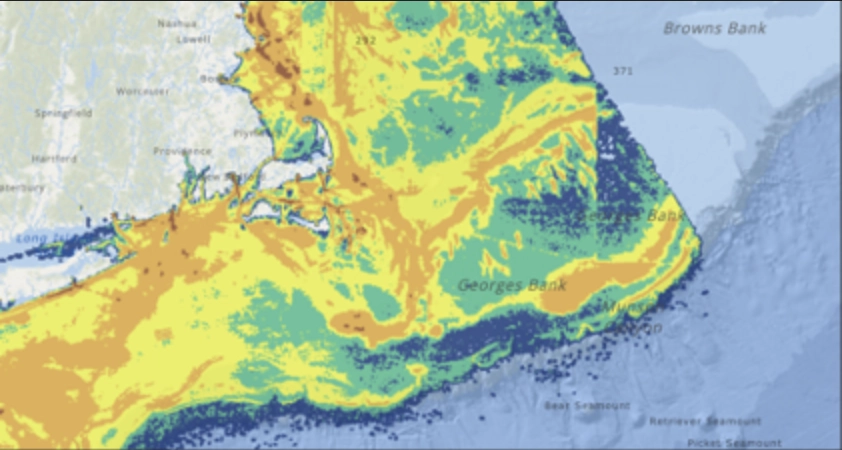
As seen above, a substantial amount of fishing takes place off the coast of Cape Cod, with red areas having a high volume of ships and blue areas having the least. Charting a course avoiding these hotspots in addition to all the other hazards has not been an easy task.
The center of the Atlantic lacks most of the hazards found along major coastlines, but they return as the glider nears Cape Town, the first of our stopping points. Ships off the coast of South Africa may not match the same level of danger stemming from the high volume of ships off of Cape Cod, but one factor does come into play: illegal fishing. Entire areas of the ocean become filled with unknowns, forcing the glider to take a bit of a wider route.


We’ve covered a few of the hazards surrounding Cape Cod’s coast today. Taking all of them into consideration, the best area for us to launch is around here.
The area that we pinpointed has a low fishing rate considering it’s distance to land, has a low shipping rate, and it’s in an offshore wind site that won’t have alot of activity around the time of our launch, making it a prime location to deploy our glider at!
That’s all the information we have to share with you all for now. Be sure to check back next week for more! Sea you later!
4/03/2024
Sentinel Mission Blog: Entry 2 – Flight Planning
Hello there everyone! Welcome back to the Sentinel Mission Blog! You may remember that in last week’s post we mentioned our flight planning group. Today, we’ll be diving into one of the tools that they use to expedite the flight planning Process– The Glider Guidance System!
The main thing that the Glider Guidance System (GGS) does to help pilots guide gliders in a dynamic ocean using predictions of the depth average currents of a given area. Depth-averaged current data is important because gliders are buoyancy-driven, and as they move by flying up and down through the water column (with a vertical range of 1000 meters) by changing their density, the systems profile they “feel” the depth-averaged currents in the ocean. Therefore we need a water column average current estimate to predict the potential glider flight. The vast majority of ocean currents do not flow in the same direction over depth, and surface currents may even have direct opposite counter currents hundreds of meters beneath them. Therefore, we are actively using a newly developed (by Rutgers Operational Masters Student Salvatore Fricano) Glider Guidance System that provide us with depth-average current magnitudes for helping us choose the best path for Sentinel for the glider maximizing efficiency and when possible saving power in the glider batteries by surfing currents in a positive direction to our target.
Now that we have established the purpose of the GGS, we should find out how it achieves its function. Given the working area for a mission (latitudes, longitudes, and depth range), the GGS can get real-time data from a few different ocean models., those models being, RTOFS, CMEMS, and GOFS. RTOFS is NOAA’s model, CMEMS is the European Model, and GOFS is the US Navy’s Model.
These models compute point-values for ocean currents which are spaced out on a grid across latitude, longitude, and depth. The latitude and longitude grids are usually well spaced, but the depth positions at which data points are calculated tend to vary based on where strong temperature and salinity gradients in the ocean are. This happens because all ocean physics equations are based off of gradients, which results in the depth point values being unevenly spaced. Because of this, the average of the depth point values over the latitude and longitude are improperly weighted and therefore unusable.
Thankfully, we have a solution for this problem: Interpolation! Interpolation allows the GGS to fill in the intermediate values between 2 points values over depth. Since GGS interpolates to a 1 meter resolution, we can take the raw ocean data from the model we’re using, which, for example, could only have 100 data points scattered around 1000 meters of water, and increase the resolution so that we have one data point per meter of depth! Since we now know what the ocean is modeled to look like within our range, we can then average those values to get the depth-average for each grid position!
That whole process we just discussed was only how we got the data for one point. In order to get to our end goal of a map, we’ll need to repeat that process many times. Thankfully, we have a solution to that issue as well; vectorization.
Vectorization is a technique that lets the same operation be applied to multiple data elements at the same time. GGS will use vectorization to apply the depth-averaging method described above to every latitude and longitude positions in the model’s grid at the same time. It’s the same idea as doing a task on your own vs. doing it with a group. Doing it on your own could take a long time, but doing it with others could significantly reduce the time spent on that task! Thanks to vectorization, the GGS can compute depth-averaged ocean current data for any part of the world extremely fast! The program will then plug that data onto a map, which takes a few minutes, and the process is complete!
Now that we’ve gotten through the meat and potatoes of the GGS, it’s time for some general/miscellaneous information! Our first item here is automation. The GGS can be run manually by end users or it can be set up on a server for automation. This is done on a case-by-case basis. Automated depth-averaged current maps can be very useful for glider pilots making daily adjustments to a glider, like in an area with a high amount of current activity, such as the Gulf of Mexico, where the GGS is currently being used to support the active glider missions going on as a part of the National Academies Understanding Gulf Ocean Systems (UGOS) Initiative.
Lastly, it’s time that we look at the reasoning for the existence of the GGS. The GGS was actually inspired by the Sentinel Mission! When the first route-planners were going at their task, it became clear that a dataset that represented the full range that a glider could go was needed.
Glider pilots usually observe surface current data to plan their missions and get ocean information. However, due to the length and distance of our journey, we need to use all of the range we have access to, and since ocean currents can change with depth, the planners needed a way to represent the currents over our range of depth and any other hydrodynamical forces that the glider would experience. Thus, the GGS was conceptualized, and Sal Fricano began programming it for his Masters in Operational Oceanography Thesis! It has been in development for around 5 months, and has been developed around user feedback during its early applications in supporting glider missions, like the ones going on as a part of the UGOS initiative. After Sal defends his thesis in August, the GGS will be made publicly available as a toolbox for glider pilots around the world!

That’s all the information we have to share with you all for now. Be sure to check back next week for more! Sea you later!
Additionally, We here at the Sentinel Mission blog group would like to extend our sincerest thank-you’s to Sal Fricano for explaining the GGS! Thanks Sal! Good luck on your thesis defense!
3/26/2024
Sentinel Mission Blog: Introductory Message
Hello Everyone! All of us here at the Rutgers Department of Marine and Coastal Sciences have something exciting to share. Introducing… The Sentinel Mission! This will be the first ever mission of an autonomous glider to circumnavigate the world, and we are going to be the ones to do it. Pretty neat right? Let’s start off with a bit of background information: what is a glider?
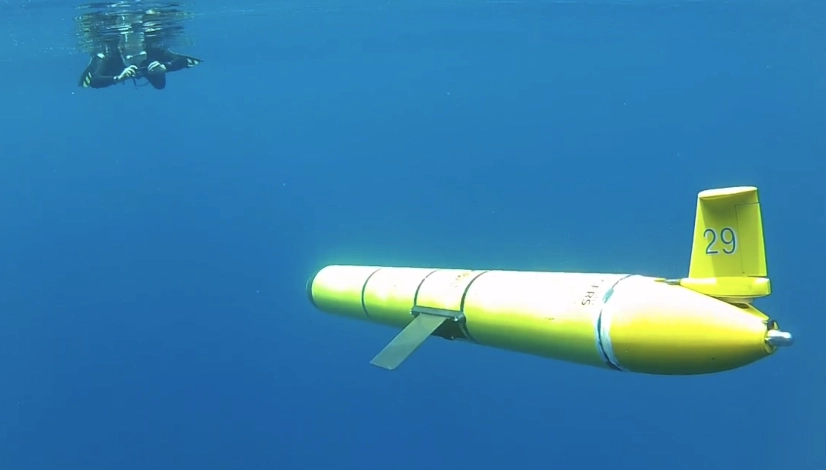
Image of Rutgers Glider
The Slocum Autonomous Underwater Gliding Vehicle is a robot that moves along the water column by climbing and diving down through it. When one is in the water, it can collect data on a variety of parameters, such as: salinity, temperature, chlorophyll in the water, and more!
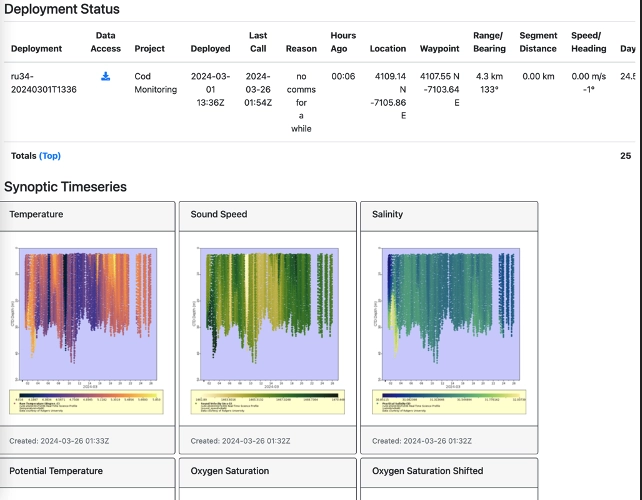
Data taken from current glider ru34 deployment
They’re usually pretty slow, with a horizontal speed of around 0.5 mph. However, Even with their slow speed they are capable of traveling great distances! When we’re sending a glider on a mission, we try to ride any currents that are going in the same direction that we are in order to increase our speed and decrease battery usage! A big example of when we used strategies like this was 2009, when we sent a glider all the way across the Atlantic Ocean!

Image of people operating the 2009 glider from the RUCOOL Room at Rutgers
The glider being used for our mission was built by the Teledyne Webb Research Corporation. It is their Sentinel Model, which will eventually be commercially available.
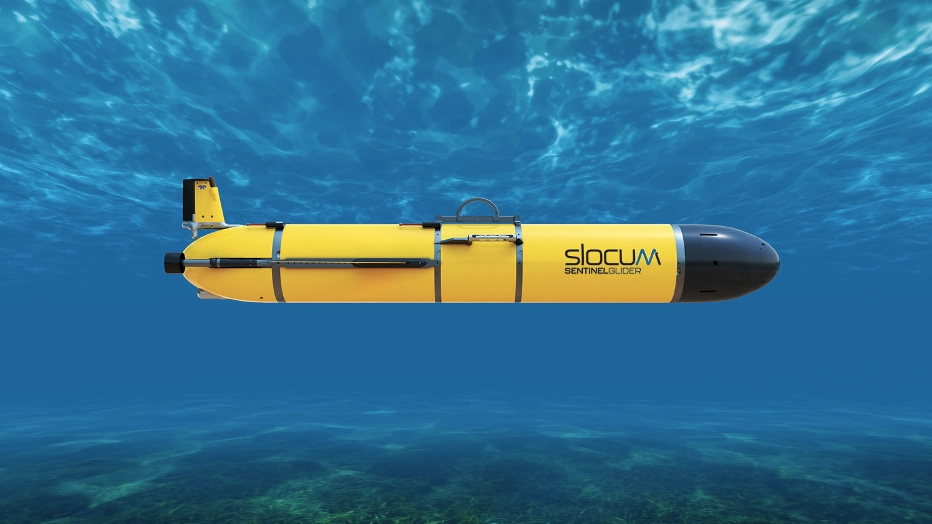
Slocum Sentinel Glider
In this introductory post about the Sentinel Mission, we’re going to be covering what we’re doing, how we’re doing it, and why we’re doing it. Let’s get started!
What we’re doing
The purpose of the Sentinel Mission is to send a glider to circumnavigate the globe. Although glider technology has progressed since 2009, we aren’t at a point where we have the battery power to go around the whole world on one charge. This caused us to need to make a few stops on our journey. However, our stops serve another purpose as well; They allow us to visit our partner universities and allow us to give educational talks about the glider to bring awareness to the mission.
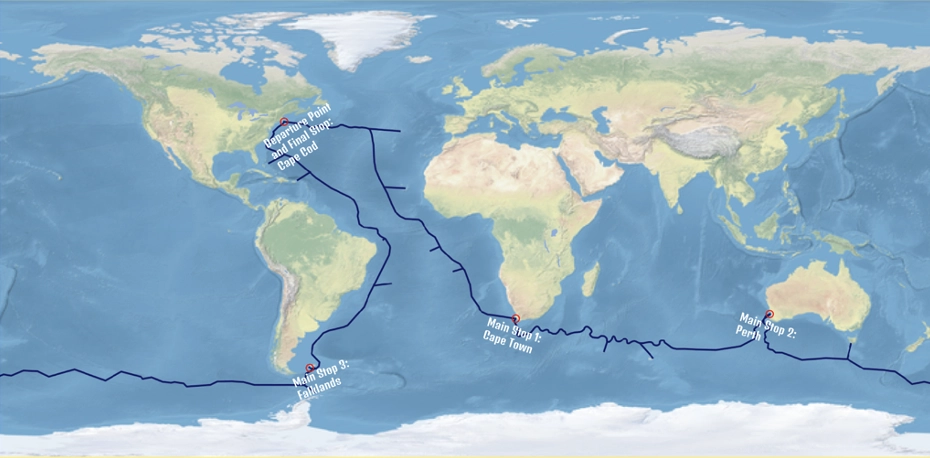
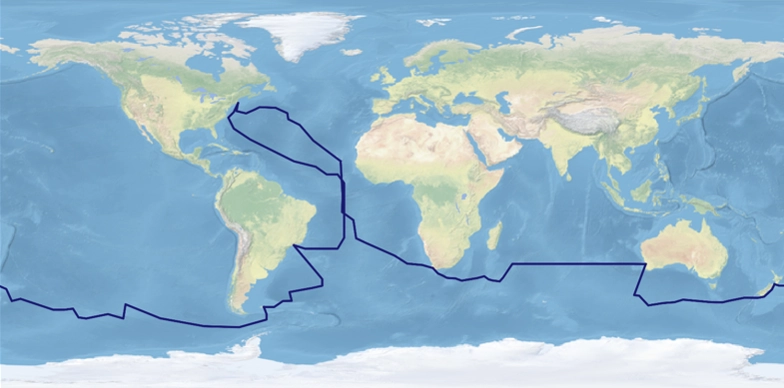
Map of the current flight plan of Sentinel Mission
The first part of our Mission will be taking us from Cape Cod, Massachusetts to Cape Town, South Africa. After that, we will head from Cape Town to Perth, Australia, and then to the Falklands, an island off the coast of South America. Lastly, we’re headed from the Falklands back to Cape Cod. This trip should take around 4 years and we will be launching this summer.
How we’re Doing it
A few things are necessary for our mission to be successful. As stated above, the glider is not very fast. To remedy that, we’ll be utilizing any currents that travel in our desired direction, like the Gulf Stream in the Atlantic Ocean. Our utilization of currents is pivotal as the glider can be taken from its base speed of around 30 km/day to over 150.
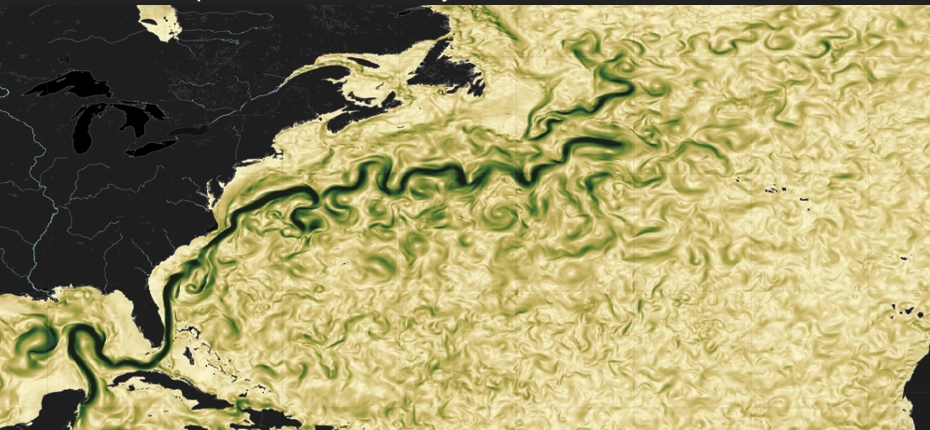
Map of the Gulf Stream and other currents in the Atlantic Ocean
From Cape Cod, we’ll be riding along the Gulf Stream for a while. We have a very talented crew working on our flight path, so they will be the ones in charge of deciding the most efficient path to take. We will be making a few stops on each part of our journey to check in on and recharge our glider. It will be imperative to be in contact with people who will be able to change our batteries and scrub off any biofouling that may affect the glider’s efficiency.
A computer rendering of barnacles growing on the glider taken from the Atlantic Crossing Glider Documentary
Why we’re doing it:
Why send a glider across the world? Water makes up 71% of the Earth’s surface. Despite how much of our planet is covered by the ocean, only 5% of it has been explored. Sending a glider around the world can provide a new perspective on how our ocean works while exploring the unknown. Another goal of the Sentinel Mission is to connect people around the world, just like our ocean does. By making stops at some select locations during its trip, the glider will bring local communities together and spread awareness for studying our vast ocean.
Alright everyone, that’s all that we’ve got to share with you this week! Be sure to stay tuned for any future updates! Sea you later!
3/22/2024
Dear Douglas Webb,
We are a large group of undergraduate students at Rutgers University. We are enrolled in a course Topics in Marine Sciences taught by Scott Glenn, Josh Kohut, and Oscar Schofield. This course is focused on interpreting the data collected by gliders deployed over the world. Every week we start off class by looking at ocean data collected by gliders that are at sea, we analyze the data and then discuss the underlying oceanography together as a class. What is amazing is that these glider tools let us go to sea while we are still taking other classes. As many of us are fully booked in our classes and hold jobs to pay for school, it is amazing that we still have the opportunity to explore the ocean in real time. This is only possible because of the vision you had decades ago and the work you did to make this vision a reality. We want to thank you for giving us an amazing opportunity.
We wanted to write to you today to tell you about the Sentinel Mission. Teledyne Marine has been working diligently on the Sentinel glider and they partnered with our class for conducting the first glider circumnavigation of this planet. We have been working on this mission for the past 18 months in preparation and this is a mission that will be anchored tirelessly by undergraduate students from around the world. We have been working on everything from mapping the route, to promoting the mission to our communities, businesses, other countries and universities from around the world.
Your vision decades ago has given us so many opportunities to learn more about the ocean and teach us, the next generation, about the great adventures in exploring this ocean planet. As we embark on this global mission, we are striving to “work hard, have fun, and change the world”. We want this mission to be in honor of your legacy that has permanently changed how we can interact with the ocean. We thank you for changing how we go to school, learn, and get inspired to meet the many global challenges facing us all. We have enclosed the sticker designed by us and really look forward to starting this mission in summer of 2024 and sharing our nautical adventures with you. Thank you Doug!
Yours truly,
The Sentinel Mission Undergraduates (Class of Spring 2024)
Peterson Baldera, Charlotte Bsile, Ireland Benson, Aiden Blanos, Gabrielle Bond, Christine Capria, Jason Cardona, Jonathan Chin, Shea Cinquemani, Sophia D’Arienzo, Terrika Davis, Jessica Defo, Justin Dirosa, Jaheem Ellison, Baylee Foreman, Tyonna Griffin, Michael Hasselmann, Sarah Keppler, Ezekiel Kloza, Tolga Kose, Shea Lawless, Matt Learn, Karolina Leleniewski, Amanda Lemasters, Christopher Maderia, Brendan McCann, Grace Mchugh, Helena Messihi, Elizabeth Morocho, Jefferey Mowen, Kenneth Navarrete, Hailey Nowak, Hirkari Oshiro, Giaminh Phan, Ashley Rosales, Victoria Samuel, Luis Saula, Sonia Sharma, Zoe Sousa, Abigail Stisi, Jessica Stochel, Greg Wareham, Keva Wilson, Marc Youhana, Devorah Zambas